大热的四轴飞行器设计,提供软硬件参考方案
时间:09-20
来源:3721RD
点击:
M1117转换为5V为惯性测量模块和电调供电。
显示部分
显示部分为无线发送回来数据进行处理显示和对发送控制命令的显示,具有辅助调节作用,该部分采用2.4寸TFT显示。
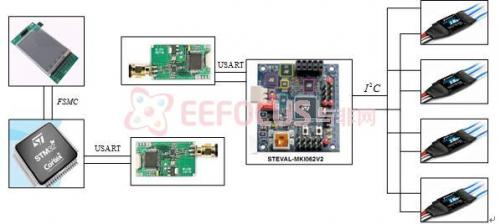
图3
3.3系统软件架构
姿态检测算法
将陀螺仪和加速度计的初始测量值减去常值误差,获得角速度和加速度,并对加速度进行积分。然后对角加速度积分和加速度积分数值融合处理。融合目的包括两个方面:一个对角速度的飘移进行估算,加入到角度值里面。另一个对陀螺仪的常值数值进行修正。
控制算法
算法的核心是对角速度做PI计算,P的作用是使四轴飞行器能够产生对于外界干扰的抵抗力矩,I的作用是让四轴飞行器产生一个与角度成正比的抵抗力。对角速度做I预算实际得到的是角度值,如果四轴有一个倾斜角度,那么四轴飞行器就会自己进行调整,直到倾角为零。它所产生的抵抗力与角度成正比,但是如果只有I的话,四轴飞行器会马上进行震荡,PI必须结合起来使用。
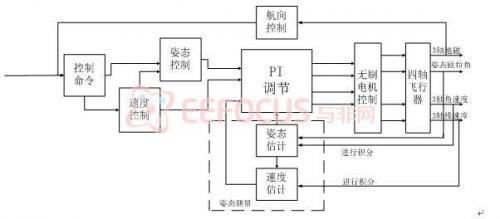
控制系统框架图
3.4 系统软件流程
四轴飞行器姿态控制程序运行流程图如图5所示,系统上电以后进行系统初始化,包括时钟配置,端口初始化,液晶界面初始化。由控制器发出控制指令,如果四轴飞行器上姿态调整板能接受并产生应答信号,则进行传感器校准,系统电量检测,电量充足则等待无线指令,当接收到无线指令后,由姿态控制板就行姿态检测,数据采集进行算法处理,并通过IIC把控制命令传递给电调进行电机转速控制,以进行飞行控制。在整个过程中采用ADC采集电源模块输出电压,以进行电量检测,如果电量不足,则飞行器落停或者不起飞。
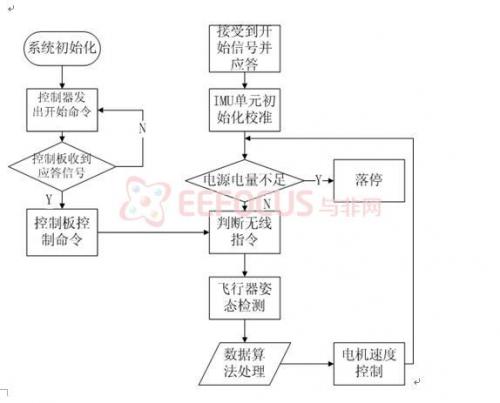
程序运行流程图
- 意法半导体(ST)荣获计算机世界杂志所颁发的荣誉奖项(05-30)
- 意法半导体(ST)与Digi-Key宣布北美iNEMO? 设计大赛获胜名单(06-18)
- 意法半导体(ST)首届中国iNEMO校园创意大赛拉开帷幕(06-26)
- 意法半导体(ST)积极培养新一代工程师,拉开2012年中国iNEMO校园设计大赛帷幕 (04-28)
- 意法半导体(ST)与哈工大建立联合实验室,助力大学生电子技术创新(06-03)
- 意法半导体2012 iNEMO大赛闭幕(11-07)