基于FPGA的疲劳驾驶检测系统
传感器电路、电源电路、语音电路、外围接口电路等部分组成。
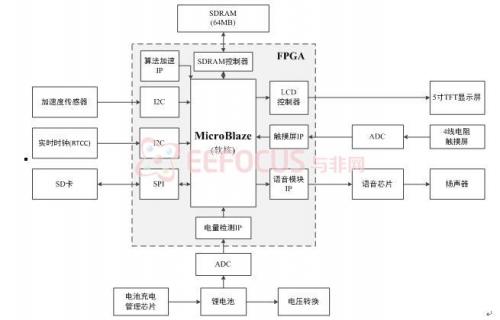
图 2-2 系统结构框图
系统利用加速度传感器采集车辆行驶时的转向加速度与驾驶员头部的运动状态等信号,传输到CPU,通过算法加速模块计算出当前的疲劳值后,将结果以疲劳曲线的形式绘制在TFT显示屏上。一定时间后将疲劳值信息存储到SD卡中,方便后续的查看。用户可以通过电阻式触摸屏实现人机交互,如查看历史记录。
各部分功能如下:
控制单元:负责管理硬件资源和软件任务间的通信和调度,实现界面显示和用户交互,采集加速度传感器的信息,通过算法计算出疲劳值,控制电池的充放电以及语音报警提示。
存储单元:存储Bootloader、Linux内核镜像以及用户应用程序,以实现嵌入式系统的正常运行。在用户存储空间保存用户的疲劳信息,以便查看。
外围接口模块:实现系统与外围设备的通信。如UART、I2C、SPI、VGA等接口。有些特殊器件通过设计相应的接口IP实现通信。
2.2疲劳检测原理
本系统通过加速度传感器,提取车辆行驶的最基本加速度和转向角信息,在通过数学变换得到车速标准差、加速度小波分解的edl尺度归一化能量、加速度小波熵、转向角小波熵、转向角的小波分解的ca5尺度的归一化能量、转向角速度的标准差和转向角速度的能量等七个参数作为检测疲劳驾驶的特征量。下面介绍这些特征量的生成方法。
特征生成
标准差的生成
标准差是一组数据平均分散程度的一种度量,依据以下方法计算:

转向角速度能量
 (2-2)
(2-2)
小波熵的生成
 (2-3)
(2-3)
为 概率,且 =1。
小波分解的某一尺度归一化能量
 (2-4)
(2-4)
式中, 为i尺度下的能量, 。
。
基于主成分分析的特征提取
主成分分析法(Principle Component Analysis,PCA)是一种利用变量间的线性关系对多维信息进行统计压缩的方法,能够有效解决输入相关性问题。
主成分分析的主要思想是,对于总体 ,将其主成分定义为这个P维向量的线形组合 ,
,将其主成分定义为这个P维向量的线形组合 , 则:
则:
 是X的线性函数,即要求
是X的线性函数,即要求 ,
, 是
是 维待定常数向量,
维待定常数向量,
i=1,2,?,k。
要求 尽可能大,即
尽可能大,即 能充分反映X的变化情况,i=1,2,...,k。
能充分反映X的变化情况,i=1,2,...,k。
要求  互不相关,即
互不相关,即 ,i
,i ,或者
,或者 之间尽可能不含重复信息。
之间尽可能不含重复信息。
这样的  均称为X的主成分。从几何上讲,样本点
均称为X的主成分。从几何上讲,样本点 在P维空问形成了一个P维球形状的云团,主成分分析就是通过提取云团散布最大的那些方向的方法,达到对特征空间进行降维的目的。
在P维空问形成了一个P维球形状的云团,主成分分析就是通过提取云团散布最大的那些方向的方法,达到对特征空间进行降维的目的。
2.2.1模式识别算法
本系统在实验阶段尝试了四种疲劳驾驶模式识别算法,他们分别是:模糊聚类算法、BP神经网络算法、RBF神经网络算法、PNN神经网络算法。几种识别算法的比较见下表:
表格 2?1 几种算法的比较
| 算法名称 | 识别效果 | 收敛速度 |
| 模糊聚类算法 | 准确率80%左右 | 收敛速度较快 |
| BP神经网络算法 | 准确率90%以上 | 收敛速度慢,有时未收敛 |
| RBF神经网络算法 | 准确率70%左右 | 收敛速度快 |
| PNN神经网络算法 | 准确率90%左右 | 收敛速度快 |
综合考虑识别正确率和收敛速度,PNN神经网络算法的识别效果较好,收敛速度最快,最适合于在实时状态下运用。
2.3加速度传感器模块
现在市面上出现的检测仪大部分是基于摄像头的检测系统,使用摄像头检测,不仅功耗高,待机时间短,而且摄像头检测会让驾驶员有一种被窥视的感觉,影响驾驶员情绪,不利于驾驶员的正常驾驶。而我们的检测仪是基于加速度传感器的检测系统。使用加速度传感器不仅能检测驾驶员的行车状态,还能检测车辆的行驶状态,将两者的状态相互结合,可以得出比其他产品更加精确的结果。而且使用加速度传感器还能降低产品功耗,增加待机时间。
在本系统中,我们使用美新公司的数字化热对流方向定位传感器(DTOS)MXC6225XU来收集基本运动信息。MXC6225XU是一款低功耗,低成本,高精度的两轴运动定位传感器。它拥有整个加速度计产品中最低的零重力偏移量,范围在整个运行的+/- 50mg 。MXC6225XU它输出的是两个垂直方向加速度8bit数字信号,最大值 ,采用 接口与外部通信。
总线接口都是开漏或者开集电极输出,因此需要接上拉电阻。传感器外围电路如下:
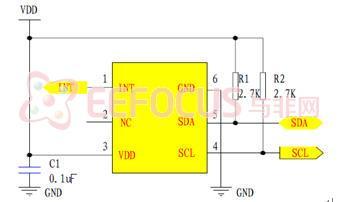
图 2-3 加速度传感器应用电路
2.4LCD触摸屏模块
传感器检测到信息后,为了方便驾驶员及时的调整驾驶状态,需要及时的将
- 德州仪器推出具备n因数与串联电阻校正功能的+/-1℃远程与本地温度传感器(09-15)
- 基于FPGA的超声波液体密度传感器(07-05)
- 基于FPGA的司机眼球跟踪疲劳检测报警系统(07-05)
- 智能手机传感器管理,FPGA比AP+MCU方案功耗低10倍(10-11)
- 采用MEMS麦克风实现复杂环境下对特定语音的提取与放大(06-02)
- 多款陀螺仪表头设计、平台测试、系统研究方案及应用实例(06-28)