实现最优的传感器:ASIC与MEMS协同设计方法
传感器性能对MEMS和ASIC参数的高度依赖性表明,闭环传感器的系统级设计需要做大量的折衷考虑,其中的ASIC噪声预算、激励电压、功耗和技术都高度依赖于MEMS参数。因此为了实现最优的传感器,强烈推荐基于传感器总体目标规格的ASIC与MEMS协同设计方法,而不是针对已经设计好的MEM再进行ASIC设计。
微机械式惯性传感器已经成为许多消费产品的一个组成部分,比如手持式移动终端、照相机和游戏控制器等。此外,微机械式惯性传感器还被广泛用于工业、汽车安全和稳定控制以及导航领域中的振动监测。一般来说,微型传感器可以是压电式、压阻式或电容式传感器。然而,电容式传感的高热稳定性和高灵敏度使得它对种类广泛的应用来说更具吸引力。
带数字读取功能的基本的电容式传感器接口电路由电容到电压转换器(C/V),以及随后的模数转换器(A/D)和信号调节电路组成。以开环配置(没有反馈信号)运行这种传感器可以形成相对简单的系统,这种系统本身就比较稳定。尽管如此,开环工作时的系统对MEMS参数会非常敏感。此外,整个系统的线性度受传感器系统链中每个模块的线性度影响,而且C/V和A/D的动态范围要求可能会更加严格。相反,将MEMS传感器放在负反馈闭环中使用有许多好处,例如改进的带宽、对MEMS器件的工艺和温度变化具有较低的敏感性。另外,由于C/V只需要处理误差信号,与开环工作方式相比,C/V动态范围和线性指标可以放宽。因此为确保系统的稳定性,正确设计反馈环路就显得非常重要。
在电容式传感器中,反馈信号以电容激励电极上的电压信号形式施加到MEMS.这个施加的电压将产生一个静电力并作用到MEMS质量块上。因此最终形成的系统被称为力反馈系统。然而,电容有一个二次的电压比力关系,它会限制系统的线性度。
克服电压比力(V/F)二次关系负担的一种方法是以差分方式施加激励信号,以便抵消二次项。然而,这种技术要求正负电压值,这将增加传感器接口ASIC的复杂性。更重要的是,差分工作所需的两个激励电容如果不匹配会导致激励二次项不能完全抵消,因此电容不匹配将限制系统可实现的性能。
实现闭环工作的另外一种方法使用两级bang-bang反馈信号。由于只用到两个点的二次V/F关系,这种方法天生就是线性的,而且并不依赖MEMS电容的匹配或使用负电压去抵消非线性。使用两级激励意味着将反馈信号幅度中的信息转换为时间信息。因此Σ-Δ调制可以成为实现闭环数字读取传感器的一种有效技术。另外,基于Σ-Δ的环路默认提供模数转换功能,因此不需要再使用单独的A/D.Σ-Δ闭环架构代表了高性能数字读取传感器的最优架构。值得注意的是,Σ-Δ系统的超采样特性会使操作系统工作在相对较高的频率,因此系统变得较易受MEMS寄生电容耦合的影响。尽管如此,抵消这种耦合的电路技术已经非常成熟,并且可以在传感器的接口ASIC中实现。Σ-Δ闭环传感器的架构选择需要依据为电子Σ-Δ系统开发的深层技术。然而,具有自然电子-机械特性的Σ-Δ闭环传感器在系统级设计与优化时需要正确理解MEMS的工作原理和建模机制。典型MEMS传感器的检测部分行为就像是一个二阶集总式质量块(阻尼器)弹簧机械系统,具有单一的谐振频率,其传递函数如下:
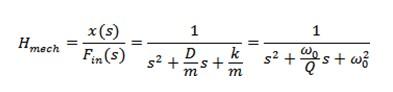
其中Fin(s)是输入的力(在使用陀螺仪时是科里奥利力,在使用加速度计时是由于输入加速产生的力)。x(s)是传感器质量块对应输入力的位移。m是质量块的质量,D是阻尼系数,k是弹簧常数(刚度)。
MEMS传感器的工作原理基于这样一个事实:给MEMS施加一个输入力(Fin)将产生一定的位移,进而改变MEMS电容(Cout)。这个Cout可以用连接MEMS单元的电路进行测量。带激励电极的MEMS传感器建模如图1所示。这个模型的增益是Kx/c,代表由于MEMS质量块位移引起的输出电容变化。Kx/c等于:
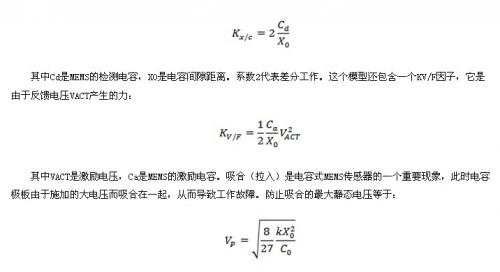
其中C0是电容的剩余容量。上述Vp表达式只是用于展示Vp的相关性。
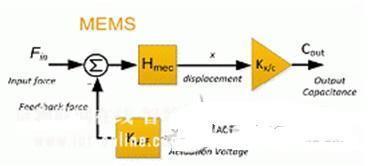
图1:MEMS惯性传感器
传感部分模型但是在像Σ-Δ环路中那样的动态电压激励情况下,上述表达式不能精确地表示Vp的实际值。在基于Σ-Δ的传感器中,MEMS用作环路滤波器,会形成一个二阶电子-机械式Σ-Δ系统。
将MEMS引入Σ-Δ环路可以提高阶数,并进一步抑制量化噪声。图2显示了基于Σ-Δ的传感器框图,其中的MEMS与特殊应用集成电路(ASIC)连接在一起组成了一个完整的传感器。这个系统还集成了一个额外的Hcomp块,用于补偿环路并保持其稳定性。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)