电阻应变式称重传感器蠕变补偿研究
时间:11-11
来源:3721RD
点击:
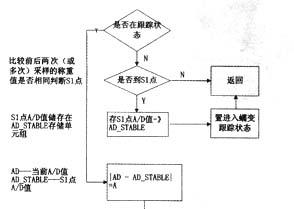
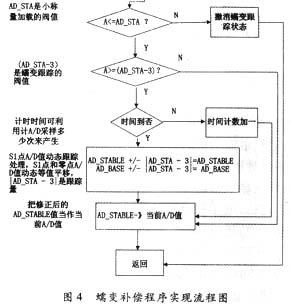
式(1)是加载到S1点天平的称重值;式(2)是加载稳定到S1点和进行蠕变补偿后天平的称重值,式中载荷蠕变和受加载影响天平零点蠕变值同是ε。?蠕变跟踪补偿的关键是判断和确定图1所示的S1点、蠕变量ε与时间的关系,然后根据这一关系进行蠕变补偿。补偿思路见图4.图4的前半段是确定S1点,后半段是蠕变跟踪处理。这里的关键问题是如何确定蠕变跟踪量和跟踪时间的关系。图1只定性地说明传感器的蠕变特性,但是,每个传感器都有定量的特性,也就是蠕变量ε与时间的关系。只有确定这一关系,才能确定蠕变跟踪时间和跟踪量(图4中的AD_STA3)。解决的办法是在天平标定时一起确定蠕变曲线。具体做法是:加载砝码标定时按规程测试蠕变特性,单片机先记录下S1点,并记录每隔固定的时间段的当前A/D值与S1点的差值,这就是该段时间的蠕变值。用软件办法记录下这个传感器蠕变量与时间的关系,然后再根据这一关系确定跟踪量(AD_STA-3)和跟踪时间。确定的原则是:固定的时间段蠕变量越大,跟踪量(AD_STA-3)就越大和跟踪间隔时间就越校反之,跟踪量(AD_STA-3)就越小和跟踪间隔时间就越大。
ING-TOP: 0px">通过对传感器工作状况和蠕变的分析,在测量过程中对蠕变误差进行实时跟踪,连续地对不同过程的蠕变量进行动态修正,因此,能实现高精度蠕变补偿。该方法只需在对天平标定时对传感器蠕变特性进行简易测试,补偿过程简单,无须人工干预,且补偿不受传感器载荷和温度影响。利用此方法设计的天平经多年批量投产证明,方法行之有效。
- 元器件常识:电阻应变式称重传感器原理(01-19)
- 从传感器的实际工作环境谈称重传感器选用(02-15)
- 称重传感器的使用基础(09-09)