超低空分布式多传感器探测节点的设计
的同时,保证各探测节点的时间的高度一致。
传感器部分根据不同的应用环境分别动态地设置相应的传感器,高可靠性地完成目标的 探测、发现、识别、定位及图像拍摄等。随着反侦察技术的发展,单一的传感器探测很难有 效地探测到目标,必须使用多传感器进行探测。在几百米以下的超低空领域,通过红外传感 器、声传感器、震动传感器等基本可以有效地探测和识别进入该区域的目标,通过红外热像 仪等摄取图像,以便更准确地判断目标,更好地进行信息融合。
4 分布式多传感器探测节点的软件设计
软件部分主要由多传感器数据采集和GPRS 远程数据通信两部分组成。多传感器探测数 据采集及处理部分实时探测和识别该区域的目标信息,经过微处理器转化成相关传送数据; GPRS 远程数据通信部分实时通过GPRS 与监控中心服务器进行通信。
4.1 多传感器探测数据采集及处理
多传感器探测数据采集是指在探测节点运行的一个采集周期内,红外传感器、声传感器、 震动传感器等输出的AD 转换值。微处理器对采集的数据进行预处理,如果发现可疑的目标 信息,启动红外热像仪摄取目标图像,随后将采集的所有参量及图像数据传送到监控中心服 务器。
在数据传送过程中,由于各项参量数据不是独立传送的,所以首先要采用TLV(标识、 长度、数据)的格式对所有的数据按顺序进行编码打包。然后,再以固定的长度对打包好的 数据进行分块,分块的目的是保证每次送入网络的数据长度适中,易于网络传输。之后再调 用数据传输子程序把每块数据顺序发送出去。
在数据传输子程序中,原始数据块依次由应用层数据传送命令报文、传输层 UDP 包、网络层IP包和链路层PPP帧报文进行封装,然后送入GPRS 模块,发送到网络中。传输层采用了UDP(用户数据报协议) 协议,该协议是一种面向无连接的传输协议,其本身没有应 答机制和命令重发机制,属于小的、节约资源的传输层协议, 传输速度快。而我们在应用层采用了应答和重发机制,所以 可以确保数据被收到。网络层则采用IP 协议,IP 头里包含了本机IP 地址和监测中心IP 地址,指出了数据的传送路径。
4.2 GPRS 远程数据通信
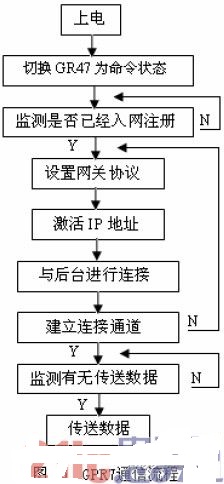
使用GPRS 模块上网进行数据传送,一般具有三种方式,一是采用公网静态IP,连接操作较简单,具有较高的可靠性和稳定性,但是静态IP 的申请和使用需要较高的费用;二是采用动态IP 结合DNS 域名解析的方式,每次上线的IP 可能不同,但可以通过DNS 动态域名解析在终端与后台之 间建立关联;三是采用APN专线接入方式,通过申请APN 专线接入GPRS 网络,然后给每个模块分配固定IP,组成一个私有广域网,这种方式也需要较高的费用。
本系统采用了第二种方式获得本身 IP,而后台监控中心服务器的IP是固定的。采用GPRS模块上网时,GPRS模块首先完成拨号登陆,然后进行数据传输。实现动态IP方式上网通信的处理流程如图3 所示。
5 结束语
本文创新点是:利用GPRS 网络作为远程无线数据通信平台,可充分发挥通用无线分组 业务数据传输的优势,把远程分布的多传感器探测节点所探测到的信息实时、有效地汇集在 一起,实现了超远距离的信息融合,可实时进行目标发现、优化综合处理,获取状态估计、 目标属性、行为意图、态势*估、威胁分析和辅助决策等。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)