直流传感器回馈补偿系统设计
对CD的充电,负反馈电压逐渐升高,输出电流I0逐渐衰减下来。与此同时,CI也被充电,随着CI两端电压逐渐增加,负反馈作用逐渐减小,输出电流I0又慢慢上升。在Ii阶跃作用下,PID输出特性曲线见图5。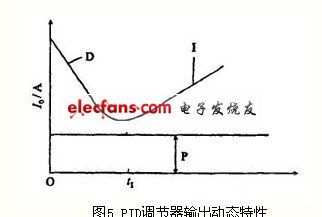
PID控制器的传递函数可表示为:G2(s)=KP(1+1/stI)(1+stD)
式中,比例作用KP=R2/R1=10,积分作用t1=R2C2,微分作用tD=R1C1。
2.1.3 反馈绕组传递函数
反馈绕组的传递函数用G3表示:G3=1/(Ls+R)=L=2.7418H
式中:R=25Ω,为反馈绕组回路总电阻;μ为铁心导磁率,H/m;A为铁心截面积,㎡;l为铁心平均磁路长度,m;L=2.7418H,为反馈绕组的自感;从为反馈绕组匝数。
阻抗增益:G4=1/R=0.06,反馈绕组的比例系数:G5=2000。
3 差值电流回馈补偿系统的德定性分析
差值电流回馈补偿系统的开环传递函数为: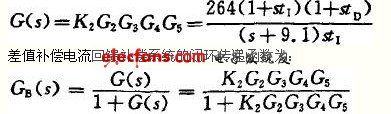
闭环传递函数的特征方程为:
D(s)=sti(s+9.1)+264(1+st1)+(1+stD) =(264tDt1+t1)s2+(264(tD+t1)+9.1t1)s+264
差值电流回馈补偿系统是一个典型的闭环系统。根据李雅普诺夫稳定性理论,线性系统稳定的充分必要条件是闭环系统特征方程的根都具有负实部,即闭环传递函数的极点均位于坐标平面左半部(不包括虚轴)。但当系统阶次较高时,在一般情况下,求解其特征方程会遇到较大的困难。劳斯及古尔维茨稳定判据,可通过特征方程的根与各项系数的关系来判别系统的特征根是否全部具有负实部,从而分析线性系统的稳定性。
古尔维茨稳定判据求得系统稳定的充要条件:264tDt1+t1>0且264(tD+t1)+9.1t1>0,可见,只要tD>0,t1>0,系统就是稳定的。
4 结 语
磁势自平衡回馈补偿式直流传感器的磁势平衡由铁心的近似矩形磁化曲线决定。其差值电流补偿电路,则是利用双向铁心磁放大器的基本原理,在电抗器铁心的空腔内设置零安匝检测铁心和线圈,用以检测该半周期内直流磁势平衡的安匝差以自动跟踪补偿。根据劳斯阵列的第一列元素符号均为正值可判断差值回馈补偿系统是稳定的。