ST集成传感器方案实现电子罗盘功能
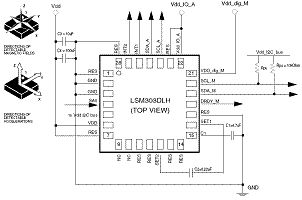
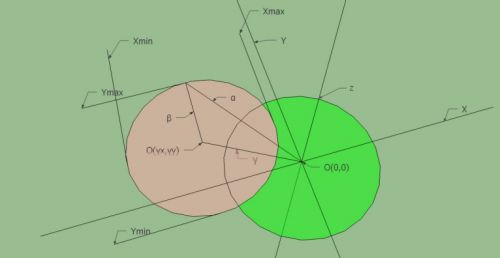
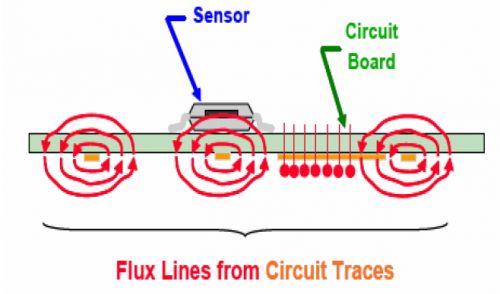
uss到8.1 Gauss共分7档,用户可以自由选择。并且在20 Gauss以内的磁场环境下都能够保持一致的测量效果和相同的敏感度。它的分辨率可以达到8 mGauss并且内部采用12位ADC,以保证对磁场强度的精确测量。和采用霍尔效应原理的磁力计相比,LSM303DLH的功耗低,精度高,线性度好,并且不需要温度补偿。 LSM303DLH具有自动检测功能。当控制寄存器A被置位时,芯片内部的自测电路会产生一个约为地磁场大小的激励信号并输出。用户可以通过输出数据来判断芯片是否正常工作。 作为高集成度的传感器模组,除了磁力计以外LSM303DLH还集成一颗高性能的加速计。加速计同样采用12位ADC,可以达到1mg的测量精度。加速计可运行于低功耗模式,并有睡眠/唤醒功能,可大大降低功耗。同时,加速计还集成了6轴方向检测,两路可编程中断接口。 一个传统的电子罗盘系统至少需要一个三轴的磁力计以测量磁场数据,一个三轴加速计以测量罗盘倾角,通过信号条理和数据采集部分将三维空间中的重力分布和磁场数据传送给处理器。处理器通过磁场数据计算出方位角,通过重力数据进行倾斜补偿。这样处理后输出的方位角不受电子罗盘空间姿态的影响,如图9所示。 图9 电子罗盘结构示意图 LSM303DLH将上述的加速计、磁力计、A/D转化器及信号条理电路集成在一起,仍然通过I2C总线和处理器通信。这样只用一颗芯片就实现了6轴的数据检测和输出,降低了客户的设计难度,减小了PCB板的占用面积,降低了器件成本。 LSM303DLH的典型应用如图10所示。它需要的周边器件很少,连接也很简单,磁力计和加速计各自有一条I2C总线和处理器通信。如果客户的I/O接口电平为1.8V,Vdd_dig_M、Vdd_IO_A和Vdd_I2C_Bus均可接1.8V供电,Vdd使用2.5V以上供电即可;如果客户接口电平为2.6V,除了Vdd_dig_M要求1.8V以外,其他皆可以用2.6V。在上文中提到,LSM303DLH需要置位/复位电路以维持AMR的主磁域。C1和C2为置位/复位电路的外部匹配电容,由于对置位脉冲和复位脉冲有一定的要求,建议用户不要随意修改C1和C2的大小。 对于便携式设备而言,器件的功耗非常重要,直接影响其待机的时间。LSM303DLH可以分别对磁力计和加速计的供电模式进行控制,使其进入睡眠或低功耗模式。并且用户可自行调整磁力计和加速计的数据更新频率,以调整功耗水平。在磁力计数据更新频率为7.5Hz、加速计数据更新频率为50Hz时,消耗电流典型值为0.83mA。在待机模式时,消耗电流小于3uA。 图10 LSM303DLH典型应用电路图 4. 铁磁场干扰及校准 电子指南针主要是通过感知地球磁场的存在来计算磁北极的方向。然而由于地球磁场在一般情况下只有微弱的0.5高斯,而一个普通的手机喇叭当相距2厘米时仍会有大约4高斯的磁场,一个手机马达在相距2厘米时会有大约6高斯的磁场,这一特点使得针对电子设备表面地球磁场的测量很容易受到电子设备本身的干扰。 磁场干扰是指由于具有磁性物质或者可以影响局部磁场强度的物质存在,使得磁传感器所放置位置上的地球磁场发生了偏差。如图11所示,在磁传感器的XYZ 坐标系中,绿色的圆表示地球磁场矢量绕z轴圆周转动过程中在XY平面内的投影轨迹,再没有外界任何磁场干扰的情况下,此轨迹将会是一个标准的以O(0,0)为中心的圆。当存在外界磁场干扰的情况时,测量得到的磁场强度矢量α将为该点地球磁场β与干扰磁场γ的矢量和。记作: 图11 磁传感器XY坐标以及磁力线投影轨迹 一般可以认为,干扰磁场γ在该点可以视为一个恒定的矢量。有很多因素可以造成磁场的干扰,如摆放在电路板上的马达和喇叭,还有含有铁镍钴等金属的材料如屏蔽罩,螺丝,电阻, LCD背板以及外壳等等。同样根据安培定律有电流通过的导线也会产生磁场,如图12。 图12 电流对磁场产生的影响 为了校准这些来自电路板的磁场干扰,主要的工作就是通过计算将γ求出。 4.1 平面校准方法 针对XY轴的校准,将配备有磁传感器的设备在XY平面内自转,如图11,等价于将地球磁场矢量绕着过点O(γx,γy)垂直于XY平面的法线旋转, 而红色的圆为磁场矢量在旋转过程中在XY平面内投影的轨迹。这可以找到圆心的位置为((Xmax + Xmin)/2, (Ymax + Ymin)/2). 同样将设备在XZ平面内旋转可以得到地球磁场在XZ平面上的轨迹圆,这可以求出三维空间中的磁场干扰矢量γ(γx, γy, γz). 4.2 立体8字校准方法 一般情况下,当带有传感器的设备在空中各个方向旋转时,测量值组成的空间几何结构实际上是一个圆球,所有的采样点都落在这个球
3. ST电子罗盘方案介绍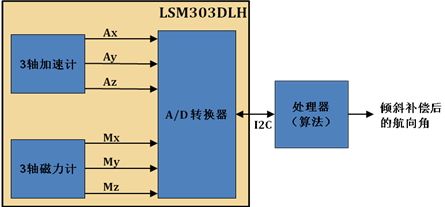

- 能量收集技术潜力无限,纳米和MEMS技术成主推力(05-25)
- 利用MEMS麦克风改善移动设备声学性能(06-11)
- 新工具瞄准在EDA软件中增加MEMS设计功能(06-11)
- SAES、意法合作开发多轴MEMS陀螺仪,力图实现更高灵敏度和稳定性(04-23)
- 新型MEMS芯片助力,“企鹅”传感器生出奇异“翅膀” (10-15)
- Akustica CMOS MEMS数字传声器销售量突破两百万大关(10-15)