多传感器智能轮椅的硬件系统设计
通过计算从码盘读出的信息得出结果,代价是需要一定的计算时间。
在TMS324LF2407A芯片上有两个时间管理模块(EV),每个EV模块都有一个正交编码脉冲电路,使用该电路后,在两个相应引脚上即可输入正交编码脉冲。该电路可用于连接光电码盘以获得旋转机械的位置和速率等信息,但需要注意的是,此时必须禁止相应引脚上的捕获功能。
正交编码脉冲电路的时序可由通用定时器2(或通用定时器4,EVB模块)提供,通用定时器必须设置成定向增/减模式,并且以正交编码脉冲电路作为时钟源。
正交编码脉冲是两个频率变化且正交(相位相差90°)的脉冲,它由电机轴上的光电编码器产生,码盘在电机轴上并且有许多空线槽,可以透光,当电机带动码盘转动时,如果发光二极管发出的光被挡住,那么后面的光电传感器就接收不到信号,然后光电传感器发出一个低电平脉冲,即"0",如果旋转位置正好使得光源可以透光线槽,那么光电传感器感应到信号,就发出一个高电平脉冲,即"1"。
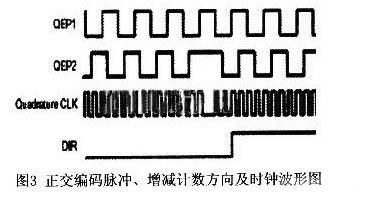
正交编码脉冲电路的方向检测逻辑决定了两个脉冲序列中哪一个是先导序列,接着它就产生方向信号作为通用定时器的计数方向输入,两列正交输入脉冲的两个边沿都被正交脉冲编码电路计数,因此,产生的时钟频率是每个输入序列的4倍,且把这个时钟作为通用定时器2或4的输入时钟。图3给出了正交编码脉冲、增减计数方向及时钟的波形。
2.3 姿态传感器
本系统区别于其他轮椅设计的一个最显著的特点,就是本设计能够仅仅依靠两个轮子完成车体的平衡。这个显著特征要求它有特殊的结构,基本的设计思想为:保持两个轮子分别由独立的直流电动机驱动,并且在一条轴线上,车体的重心保持在轮轴以上,使用检测车体倾斜角度的传感器实时地获取车体的姿态信息,机器人的处理器将传感器信号进行处理,按照一定的控制算法计算出控制量控制电动机的转速和转向,驱动机器人前进或后退,完成车体的平衡。
本智能轮椅采用一个倾角传感器和一个陀螺仪的组合构成姿态传感器来检测车体平台的运行姿态。倾角传感器用来测量轮椅偏离竖直方向的角度,陀螺仪用来测量角速度。
以TMS320LF2407A为控制核心的运动控制器,根据编码器和姿态传感器检测到的平台运行的位移和姿态信号,通过一定的控制策略计算出控制量,再经脉宽调制控制及驱动器放大后驱动直流电动机运转,随时调整车体平台的运行速度,从而使车体平台始终保持平衡状态。控制电路原理图如图4所示。控制板采集来自倾角和角速度传感器的信号并对信号进行调理(滤波、整形、偏移),然后将信号传送到控制板中,经过DSP的运算处理(控制算法由电动车系统的数学模型推导而出),通过DSP的两路脉宽调制将控制信号发出,再经过电机驱动模块驱动电机运转,控制轮椅保持平衡状态。

2.4 摄像头
用于感知环境的深度信息,如判断前方是否有楼梯以及提取楼梯的高度信息,提取路途标志物用以导航等等。摄像头可直接通过USB与PC机通讯,在这里不再另外叙述。
3 结束语
本文设计了用于智能轮椅的多传感器环境感知系统,对各数据采集子系统做了详细的介绍,采用简单可靠的硬件电路感知环境信息。经实验证明,此系统方案具有硬件电路结构简单、工作可靠、精度高、重复性好等特点,而且采取了模块化设计,可以更方便地添加新研制的功能模块和进行技术更新,便于消费者根据自身生活需要,选择和组合各模块,使各功能模块得到充分的应用,从而能够满足不同消费阶层的需要。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)