基于磁敏角度技术的拉线式位移传感器的设计与应用
行通信协议输出(SPI)。
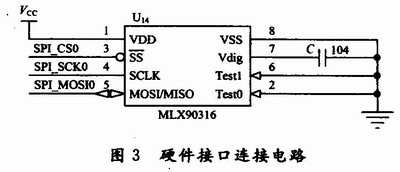
由于串行通信的输出信号直接来自于MLX90316的内部DSP输出,SPI输出模式更稳定,误差更小,并且具有更高的抗干扰能力。在本设计中,选用SPI接口,具体的硬件接口连接电路如图3所示。在图3中,MLX90316的SPI三根线与ARM LPC2136的SPl0口连接。SPI(SerialProtocol InterIace)总线接口是一种同步串行外设接口。这是一个4根信号线的串行接口协议,包括主、从两种模式。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(SS)。
2.2 RS 485通信接口电路设计
RS 485总线以其结构简单、通信速率高、传输距离远等诸多优点,在工业控制系统中得到了广泛应用。它采用平衡发送和差分接收方式实现通信,发送端将串行口的TTL电平信号转换成差分信号A、B两路输出,经过线缆传输之后在接收端将差分信号还原成TTL电平信号。由于传输线通常使用双绞线,又是差分传输,所以又极强的抗共模干扰的能力,总线收发器灵敏度很高。
在基于磁敏角度技术的拉线式位移传感器中我们设计了一路RS 485信号输出,RS 485接口芯片采用MAX3485,用于与应用系统进行位移数据数据交换。为了确保数据通信的可靠性,通信接口采用了光电隔离芯片6N137。
2.3 可控电流输出接口
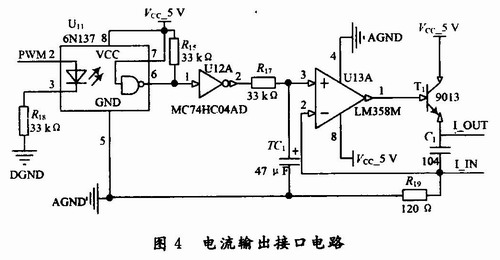
数据处理单元具备一路可控4~20 mA的电流输出,用于现场指示仪表的驱动。具体的连接电路如图4所示。其中PWM2连接ARM的PWM2引脚,PWM信号用于控制光耦的导通与截止,反相器主要用于波形的整定,根据磁敏角度和位移关系,建立数学模型,计算出PWM的占空比,从而达到电流大小调节的目的。
3 软件设计
在LPC2136中嵌入了μC/OS-Ⅱ操作系统。
μC/OS-Ⅱ是一种基于优先级的抢占式多任务实时操作系统,包含了实时内核、任务管理、时间管理、任务间通信同步(信号量,邮箱,消息队列)和内存管理等功能。它可以使各个任务独立工作,互不干涉,很容易实现准时而且无误执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化。
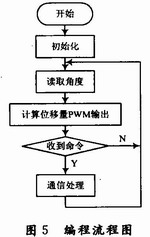
软件编程主要包含3个模块:PWM控制电流输出模块、RS 485通信模块、MLX90316的SPI通信模块,编程流程如图5所示。PWM控制电流输出模块主要通过改变PWM的占空比来调节电流的大小。RS 485通信模块主要用来接收上层系统的指令并根据指令将数据回传。MLX90316的SPI通信模块主要用于磁敏角度的读取,SPI的通讯过程为:主控端先输出1个0xAA以及1个0xFF作为通信起始信号,然后接着输出8个0xFF,而从端会同时输出2个0xFF、4个字节的角度信号以及4个0xFF,从而完成一次数据通讯。
4 结语
利用MLX90316构建位置传感器需要使用磁铁,在传感位置安装活动的机械部件(通常连接在轴的末端)。只要水平磁通量均匀的磁铁都可以使用。磁铁的大小和材料并不重要;在机械、磁场和热容限之内,水平磁通量必须在20~70 mT(例如,(45±25)mT)范围以内。
在气隙问题上,如果距离IC表面的实际气隙大于7.5 mm,环形磁铁要优于盘形磁铁。磁铁可以放在轴的末端,使用环形磁铁时可以绕在轴上。也可以使用特,殊的磁铁设计,获得旋转位置传感器正常的传输特性。
在"基于FPGA技术的堤坝位移智能检测系统"中,将基于磁敏角度技术的拉线式位移传感器用于堤坝根石位移采集装置。监测的堤坝一共为7条,每条大坝有5个关键监测点,因此,利用RS 485总线将这35个监测点组成星型网络。从试验结果可以看出,该传感器克服传统拉线式位移传感器的易磨损、分辨力差、阻值偏低、高频特性差等缺点,提高了测量精度。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)