基于COMS图像传感器的太阳自动跟踪控制器设计与实现
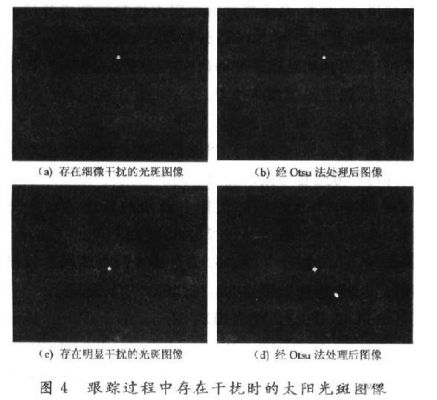
处理后得到图4(d),光斑图像坐标(160,120),光斑个数为2,对应FYP和FWP为O。由此判断拍摄的图像存在明显干扰,程序将FYP和FWP置为O,确保系统的可靠性。
一般情况下使用图像传感器跟踪,但当阴天或出现厚云层时,太阳光斑无法出现在传感器视角内,VC++立即调用时钟算法,根据太阳在天空中每分钟运动的角度,计算出跟踪控制器5 min应转动的角度,从而确定出步进电机的转速,使得装置根据太阳位置而相应变动。
2.3 系统软件设计
软件的主要部分为PC机部分,PC机环境为Windows XP,使用软件Microsoft Visual C++6.0和Matlab 7.0。启动时VC++负责调用一次sun函数,返回当前时刻太阳的高度角和方位角,并转化为FYP和FWP运行步数。通过调用Windows API函数,实现上位机与单片机间数据的传递。通过MCC实现VC++与Matlab的联合编程,控制摄像头采集太阳光斑图像,根据太阳光斑质心坐标与图像中心坐标的偏差转化为FYP和FWP校正步数。
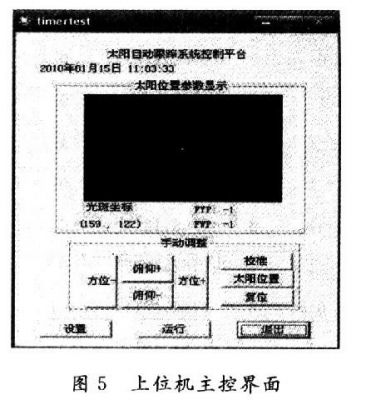
上位机可执行程序控制界面如图5所示,上位机控制平台具有实现复位,太阳位置的跟踪、手动校准。其中"设置"按钮,可进行波特率、调整时间间隔等的设置。
3 实验数据分析
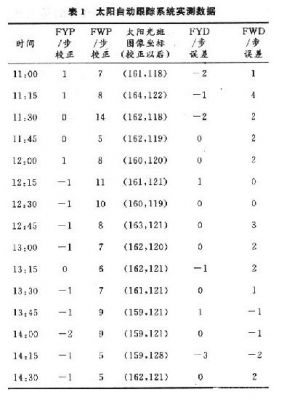
实验在苏州大学现代光学所内进行,数据观察时间为12月下旬至1月上旬。因数据量大,表1只列出2010年1月7日记录的部分数据。具体测试方法如下:
(1)参数设置。包括设置当前时间、波特率、通信端口、图像传感器运行时间间隔等。
(2)运行VC++程序。上位机中VC++程序首先调用sun函数,返回此时的太阳高度角和方位角,换算成俯仰和方位步进电机所需的步数。只记录下由Matlab生成txt文件中的需要校正的步数。
(3)系统自动校正完成后,Matlab再次写txt文件,保存校正后太阳光斑的图像坐标,以及光斑质心坐标与图像中心坐标的偏差。此时记录。
(4)每隔5 min重复(2),(3)步骤。
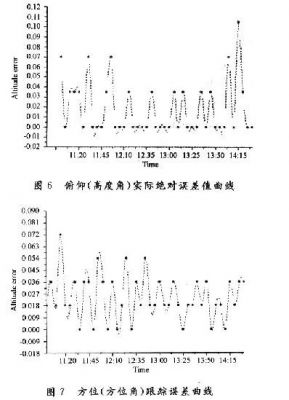
图6和图7给出了太阳高度角和方位角的误差曲线。由曲线看出,采用基于图像传感器的太阳自动跟踪控制器后绝对误差较小且保持相对稳定。通过对实测数据的分析表明:在该系统中,高度角跟踪绝对误差小于0.12°,方位角跟踪绝对误差小于0.08°,采用图像传感器对太阳进行跟踪后,得到了很高的精度,且可靠性提高。
4 结语
该跟踪控制器可以连续跟踪太阳的角度变化,更准确实现对太阳运动的跟踪。当出现阴天或多云情况下,系统调用时钟算法,使得装置连续跟踪。经过实验测试,各项指标均达到了设计要求。
控制器采用低速处理器实现了对太阳光斑的采集及定位,可应用于各种太阳能设备,提高太阳能的利用率。如果使用步进电动机的微步距控制技术,即用细分技术实现将步进电动机一个整步均分为若干个更细的微步,可以使整个控制系统更加精准,可用来实现对各种点光源的检测。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)