 3.4 图像模拟
3.4 图像模拟
利用模型的纹理材料的物理属性数据和初始化LynX图形界面时初始化的一些雷达参数,从计算电磁场角度计算场景中每一个像素的RCS值,然后利用SAR成像算法,就可以进行SAR成像仿真。当用户飞过Vega场景时,Vega软件中的RadarVision计算每一个像素的RCS值,RadarWorks模块的传感器模型将RadarVision计算的RCS值与用户定义的雷达参数值(波束宽度,距离向大小,天线模式,信号处理信息)相结合产生SAR图像。这充分体现了SAR成像仿真的实时性,即当用户飞过Vega场景时,就可得到场景的SAR图像。RadarWorks也模拟了有效的SAR传感器和处理效果如频率跳动、分辨率、运动补偿,边缘增强,并且相应的修改RCS图。数据能够实时地被处理直到扫描区域一副完整的图被编辑完成。运动补偿通过计算每个像素的方位向和距离向加权函数的卷积来完成。RadarWorks也考虑了地形和人文要素形成的雷达阴影的实时计算,阴影通过IRIS Performer计算,因此要利用SGI硬件。这保证了当用户飞过Vega场景时,每个对象的几何阴影能被实时计算。
3.5 编程仿真
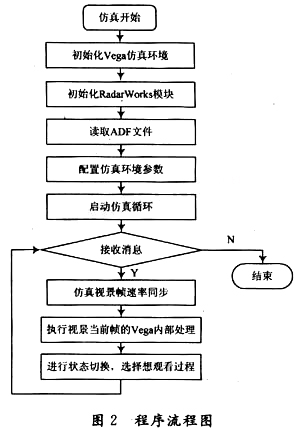
在VC++语言环境下,编程仿真。Vega软件具有友好的图形环境界面,完整的C语言程序应用程序接口API,丰富的实用库函数,这就减少了源代码的编写,提高了工作效率。编程过程中,可以调用Vega的库函数VgCetProp,通过键控来达到不同时刻、不同环境下的SAR图像。程序流程图如图2所示。
4 红外成像仿真过程
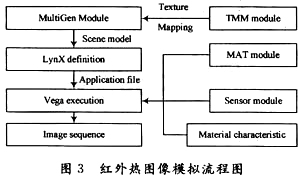
根据红外成像仿真原理可知,基于Vega的红外成像仿真方法可分为以下几个过程:首先建立场景模型;其次建立大气传输模型,并计算大气衰减;最后计算红外探测器上接收到的红外辐射强度,并完成由辐射强度到灰度值的转换,生成红外图像。SensorVision模块可以实时产生从可见光到远红外线间各个波段的红外仿真图像。利用SensorVision模块生成红外图像的过程为:在利用图形界面LynX定义的,ADF文件的基础上,SensorVision模块利用Texture Mapping Tool(TMM)设定物体的纹理和材料物理特性;然后利用MOSART Atmospheric Tool(MAT)设定大气传输模型,计算大气透射率、大气背景辐射、太阳或月亮的直接辐射等,由于计算量很大,采用预先计算好,生成mat文件。在仿真中,可以有多个mat文件,SensorVision读取.mat文件,直接使用预先计算好的这些参数可以加速仿真速度;最后通过SensorVision调用已经计算的各种参数,利用辐射度计算公式,计算场景中的红外辐射强度,并完成从辐射强度到灰度值的转换,生成红外图像。该过程用流程图可表示如图3所示。
4.1 场景建模
场景的红外成像仿真中,场景包括目标和背景。场景建模首先要建立目标和背景的三维几何模型。目标主要包括车辆、飞机、坦克等;背景主要包括地表、山坡、河流、公路、稻田、树木、建筑物等。在几何建模过程中既要模型的逼真性,又要考虑仿真的实时性要求,传统的用增加多边形数量来提高几何模型逼真性的方法是不可取的。为了加快图形显示速度,本文采用纹理映射技术来实现。TMM工具是视景仿真软件Vega提供的材料纹理赋予工具,利用它在纹理图上定义材质特性,生成纹理材质图片,为红外探测器、雷达等模块运行时提供物体的材质属性。由于物体的材质属性直接影响其红外辐射特性,这一步对红外成像仿真工作很重要,对大幅场景这部分工作也是十分繁重的。目前版本的TMM提供了10大类172种材质,并且可以创建新的材质数据,每种材质都有相应的光谱特性库和热特性库。因此,为了红外成像仿真的需要,目标和背景的几何模型建成后,要利用TMM工具为模型映射相对应的纹理材质,同时也就建立了目标的红外辐射模型。同时在建立模型的过程中,还要设定具体天气情况、星历模型以及观察者的位置及状态等。
4.2 建立大气传输模型
目标至红外探测器的路径上存在着大气,物体的红外辐射受到大气中某些气体选择性吸收和悬浮微粒散射等因素的作用而产生衰减。许多大气因素,如风、云、雾、雨、雪等,直接影响大气衰减。计算大气衰减的方法很多,主要有经验公式法和大气模型法,目前精度较高的是美国的LOWTRAN模型。而在Vega中,利用MAT设定大气传输模型,计算大气透射率、大气背景辐射、太阳或月亮的直接辐射等。MAT工具用来创建、编辑、生成大气传输特性的数据库,首先设定地理位置、大气状态、气象条件和光谱波段等参数,然后利用MOSART和TERTEM软件,根据所输入的参数,得到特定光谱范围内的大气传输特性以及相关物质的辐射特性,生成相应的数据库,以提供红外成像仿真过程中Sensor模块所需要的数据。
由于大气传输特性的计算十分复杂和繁琐,且计算量巨大,因此这部分的工作要在仿真前完成,以保证仿真的实时性。MAT将一种大气状况下,各个时间内的传输特性存放在一个数据库中,仿真过程中只要调用相应的数据库就可以得到所需数据。
4.3 场景的红外辐射建模
红外成像仿真的关键是确定物体表面的温度分布和辐射场,通过温度场来计算各点的红外辐射。实际情况下,目标的表面温度和辐射通量主要受背景辐射和内热源的影响,必须建立其适当的背景和内热源模型。对于无内热源目标,例如草地、人造物等它们的温度分布和自身材料的热特性、光谱反射特性以及背景辐射等因素有关,通过求解热交换方程来确定。而对于有内热源目标,例如飞机、车辆等,它们自身的某些部位是内热源,可以产生热量,是目标温度分布的主要因素,对此应根据实际情况给定目标的温度分布或建立内热源模型求解其温度分布。目前从国内外的研究状况来看,1996年,Hyum提出用等效热阻把内热源与物体表面联系起来的模型,借以模拟内热源与物体表面间热传导的物理过程。这种方法不仅使模型具有物理意义,而且红外仿真效果也有很大提高。目前对背景红外成像仿真的方法基本上遵从测量、经验与理论相结合的原则。TMM工具为场景模型赋予材质纹理,每种材质都有其相应的光谱反射特性库和热特性库。由于纹理材质数据库是开放的,可以根据模型的表面温度分布或建立内热源模型求解其温度分布和实际物体的材料特性,建立相应纹理材质文件(.mtl),且该文件包含材质的热特性库和光谱反射特性库,再把建立的材质文件添加到Vega的材质数据库中。根据已经建立的大气传输模型和目标与背景模型以及目标与背景构成材料的物理属性,利用辐射度计算公式计算探测器上所接受到的红外辐射强度。Vega的Sensor模块用来模拟生成可见光谱段以外的图像,Sensor模块包括SensorVision和SensorWorks两个部分。利用它可以控制红外探测器的参数,模拟探测器对红外成像的影响,处理Sensor模块与其他模块以及MAT、TMM工具的连接与调用。得到在探测器成像面上对应像元的辐射亮度,并不是最终结果,数字图像反映的是灰度值,因此必须把辐射亮度转化为灰度等级,这是个量化的过程。按照将最大的辐射度对应于255,最小的辐射度对应于0的原则生成一个灰度图像。
4.4 场景红外图像的实时仿真
Vega读取已经生成的三维红外场景模型,并考虑各种目标以及观察者的运动状态,对场景中的静态及动态目标进行实时模拟,使场景中的各种动态目标运动起来。为了方便控制场景,本文利用了一种将Vega窗口植入到基于MFC的View窗口的方法。该方法实质是将Vega着色放进MFC的View窗口中进行。当前有两种可实现View窗口的Vega驱动:一是直接继承MFC中的CView类,称为直接继承模式;二是通过继承MFC中的CView类而派生出一个子类zsVegaView,称为模板方法模式。这个zsVegaView类提供了启动一个Vega线程最基本功能,还以虚函数的形式定义了特定的应用要进行操作的通用接口,因此用户的应用程序只需从zsVegaView派生出新类并根据需要重载必要的虚函数即可。本文采用了模板方法模式。zsVegaView类由CView类派生,并封装了Vega特性的变量、函数和定义运行线程。