轨道车辆电动自动门控制系统开发
时间:07-29
来源:中电网
点击:
)=Kx(t-t0),式中K,t0都是常量,在本闭环测控系统中,系统的输出对输入的滞后会破坏其稳定性,因此最大限度保证系统精确或不失真的条件就是t0=0,但实际反馈控制中t0不可能为0,也就不可避免地出现测量及控制的死区时间。所谓死区时间可以定义为从"测量传感器检测到变量开始改变的瞬时"到"控制器对生产过程开始施加正确有效干预的瞬时"之间的延迟时间。在试验过程中,将传感器安装至自动门中部位置,调整达到了探测信号的最短距离,减少了传输延时,在安装上消除一部分死区时间;另外调整控制器的偏差容错度,即减弱控制器的整定参数,以此来减缓系统的响应速度,在不可能消除的情况下,减少死区时间。消除误差的工作中,在保证可靠适用,避免带来成本提高,在充分试验后选择前面提到型号保证了上下元器件的可靠使用。采用电磁兼容性(EMC)设计电器系统,克服信号干扰问题。
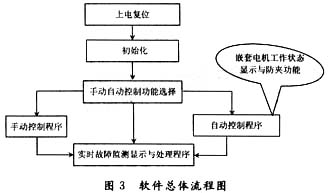
4.2 程序设计
软件采用C28x汇编语言编写,对信号实现实时处理,随着DSP的发展,其主要工作已经转向软件开发,软件开发将占据约80%的工作量,尤其算法已成为DSP核心,另外对电机的变速驱动,也最终由软件实现。
5 结 语
经过轨道车辆模拟试验运行,自动门运行速度在0~500 mm/s可调,开门时间0.1~10 s可调,探测角度大于150°,探测误差角度、障碍物执行死区时间误差率等项技术指标达到合同相关标准。对电器、机械零部件长时间颠簸、强震动、冲击环境下整个系统的可靠性及精度有了保证。
- 基于OV6630图像传感器和DSP的图像采集系统设计(06-16)
- 用于海洋搜救的多片DSP图像处理识别系统的实现(06-30)
- 基于dSPACE的双绕组感应发电机实时控制系统研究(08-11)
- 基于DSP的运动控制器的研究与开发(10-30)
- 基于ADS1274的可控式高精度数据采集系统(01-07)
- 基于DSP控制的数字移相器—变压变频器模块的设计(10-02)