想要实现机械设备自动化,工业传感器到底有多重要?
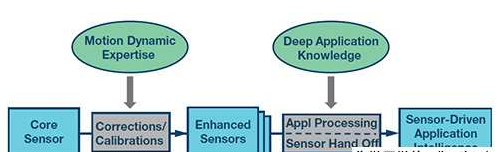
图3 从惯性传感器中摘取出有价值的应用级信息,需要复杂的校准和高阶处理。
将基本感测输出转换为有用的应用等级信息,其过程中的第二个重要步骤,是受状态驱动传感器的切换。 这需要对于应用变化的广泛知识,以及传感器的能力,以便能最佳地判定在任何时间点上所适合的传感器。
图4所示是传感器融合在工业应用中扮演角色的概念性例子。 在此,已经先针对该精确驱动的工业应用,仔细地挑选了能符合预期需要的传感器,也就是能在可能出现GPS阻塞、具有潜在干扰磁场以及其他环境影响中执行精确感测操作的工业等级传感器。
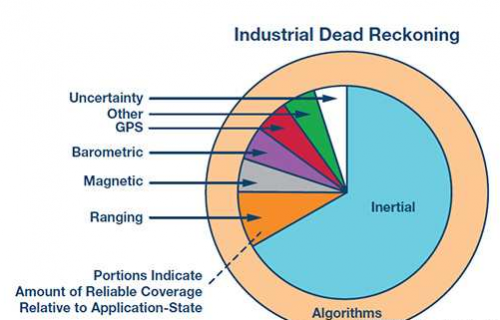
图4 传感器融合算法,仰赖于精确的传感器,经由适当的挑选来支持特定的应用环境。
因此,此例中除了在最大程度上是依靠惯性传感器,还选择了其他的辅助感测来对应特定的环境挑战,及协助校正任何长期性的惯性漂移。 虽然理想上最好是能让选择到的传感器在所有的条件下都可实现精确追踪,但这在现实上是不可能的。 因此,情境规画中还是会存在小程度的不确定性。 此外,有各种算法的存在,可用于重要的传感器校准,以及管理由应用状态驱动的复杂传感器与传感器间切换。 总结来说,终端应用将决定所需的精密程度,而所选择的传感器的质量将决定这是否可实现。
表4比较了两种情况,并说明了传感器挑选的重要性,不仅是影响设计过程,同时也影响设备的精确度。 如果仅使用于有限的应用场合,且该应用能容忍误差,则低精确度传感器实际上可能是适合的。 也就是说,如果未涉及到安全或生命问题,则这类传感器较不精确的准确性已经够用。

不同消费传感器 工业传感器准度关卡更高
虽然大多数消费等级的传感器具有低噪声,且在良好条件下能表现正常,但它们并不适用于可能处于动态运动的机器设备。 这里所说的运动包括了振动,其在低性能惯性测量单元中,会无法与我们实际上想得到的简单线性加速度或倾斜测量分离出来。 为了要在工业环境中工作时实现优于1度的准确度,我们的选择应集中于,专门设计用于抑制由振动或温度影响引起的误差漂移的传感器。 这样的高精确度传感器才能够支持更大范围的预期应用状态,以及更长的使用时间。
高性能设计不一定必须与成本、尺寸、和电力的效率互相冲突。 然而,以成本降低为主要目标的MEMS结构设计,通常确实会牺牲性能,而且有时是相当显著的。 一些用于降低成本的简单选择,如采用较小硅重量和塑料封形的消费等级封装,对MEMS性能会有很大的伤害。
要想从MEMS组件获取准确而稳定的信息如图5所示,须要维持良好的噪声比,而这就必须从组件封装一路到系统等级外壳的选择上,透过硅面积和厚度的控制,以及将施加到硅的应力最小化来达到。 在开始定义传感器时,就考虑到终端使用上的性能要求,便能优化硅、整合、封装、以及测试和校准方法,即使在复杂环境下也能维持本机性能,并使成本最小化。
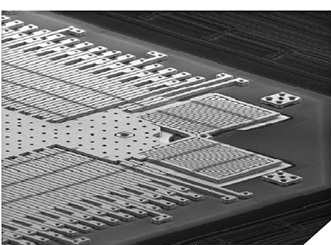
图5 用于精密运动判定的MEMS结构。
表5所示,为与手机上常见的典型消费者传感器相比,中阶工业感测组件所具有的性能(请注意,还有更高阶的工业感测组件,其性能要比所此处所示的更好上一个数量级)。 大多数低阶消费等级组件并不提供诸如线性加速效应、振动矫正、角随机游动等参数的规格,而这些参数实际上可能会是工业应用中最大的误差源。
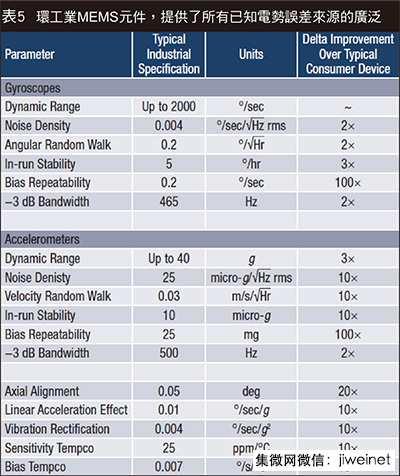
这类工业传感器是被设计用于可能会出现相当快速或极端运动(2000。 /秒,40g)的情境中,而在这种情境下,高带宽的传感器输出对于最佳讯号辨别的实现,也是相当关键的。 在操作期间,偏位的漂移越小越佳(运行稳定性),以避免为了达到正确的性能,而需要更大规模互补传感器。
在某些情况下,对于那些不能容许后端系统滤波校正所需时间的应用,启动漂移的最小化(重复性)就极为重要。 低噪声加速度计与陀螺仪的配合使用,能有助于任何g关联漂移的分离和校正。
陀螺仪传感器实际上是被设计为,可直接消除任何g事件,包括振动、冲击、加速度、重力,对组件偏移所造成的影响,因而能在线性g上提供实质的优点。 此外,其温度漂移和对准都已经透过校准而被修正。 如果没有对准修正,则一个典型的多轴MEMS组件即使被整合到单个硅结构中,都还是可能未能对准到误差主要来源的点上。
近年来,虽然噪声已逐渐不再是传感器等级的显著分类因素,但诸如线性g效应和对准这类改善(透过硅设计或组件专属校准)成本最高的参数,已成为简单或相对静态运动判定之外的各种应用的噪声额外来源。
表6中的一使用例,比较了一实际的工业等级MEMS IMU与一消费等级IMU,此两者都有相当良好的噪声性能。 然而,消费等级产品并未针对振动或对准,而设计或校准。 此范例显示了基于所述的假设,组件的规格以及其对误差预测值的影响。 总误差是三个所示误差源的平方根,线性g及跨轴(Cross Axis,Misalignment未对准)为消费等级设备产品的主导误差,而工业设备则取得较好的平衡。 总体而言,在忽略消费产品的额外潜在误差源条件下,此比较呈现了至少20倍的性能差异。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)