多旋翼无人机干货来袭,这次是传感器技术
完全没法用来规划控制自己的飞行路线。
此外,惯性测量元件还会受到温度、制造工艺的限制,产生一些测量的偏差,比如说有时温度突然变化之后,一个静止的惯性测量元件会觉得自己转动了起来,虽然它静止着,但是会输出不为零的角速度。这类测量的偏差需要比较仔细的算法进行修正,而且往往不能单靠惯性测量元件自己的测量完全消除。
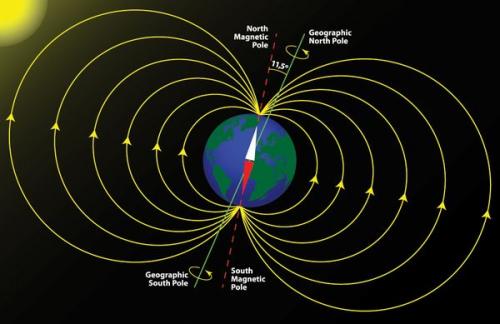
地磁指南针是一种测量航向的传感器。指南针在人们的生活中作用重大,在未知的环境中,不分南北可能寸步难行。飞行器的机身正方向朝南还是朝北这个状态量用导航的术语来说叫做航向,也就是飞行器姿态的三维角度中的一个,他在组合导航系统中是非常重要的一个状态量。
地磁指南针能够指南指北是因为地球表面空间中有看不见的横贯南北的地磁线,地磁指南针可以测量出穿过自身的地磁强度,从而指出当前自身相对于地磁线的偏转。同样地,这个理论虽然非常简单,但是地磁线的强度非常弱,很容易受到干扰。比如多旋翼飞行器通用的无刷电机,在运转的时候就会产生变化的磁场,和地磁场叠加之后,地磁指南针就找不到正确的方向了。地磁指南针的这个特性非常令人恼火,但是早期的多旋翼飞行器开发人员毫无办法,因为这是唯一的能够确定飞行器在空间中绝对航向的设备。如果不知道这个航向,就基本没办法进行组合导航。
气压计的原理最为简单。因为地球表面海拔越高,空气越稀薄,气压越低,因此气压就能够给出飞行器的海拔高度。不过,不出意料的是,尺寸和重量适合在多旋翼飞行器上使用的气压计有很大的缺陷,它的测量值会受到温度、湿度、空气流速、光照、振动等因素的影响,单靠气压计非常难实现对高度的稳定测量。
组合导航技术结合GPS、惯性测量元件、地磁指南针和气压计各自的优缺点,使用电子信号处理领域的很多技术,融合多种传感器的测量值,获得较为准确的飞行器十五个状态量的测量。前面说惯性测量元件的测量容易发散,这个发散可以通过GPS来抑制:GPS可以获得三维位置也可以获得三维速度,惯性测量元件可以获得三维加速度,加速度的积分也是速度。在通过地磁指南针获得航向的基础上,两种速度的观测就可以融合起来,通过GPS的测量值来发现并抑制惯性测量元件的发散。惯性测量元件的发散被抑制住之后,它也可以更准地测量三维角度和三维加速度。因此GPS和惯性测量元件在这些情况中互相取长补短。除此之外,气压计和GPS互相提高了高度测量的精度,地磁指南针、GPS和惯性测量元件一同提高了航向测量的精度,他们都是利用了相同的融合、"互补"的思想。
组合导航技术中传感器互补的原理直接源于1948年诞生的信息论。克劳德-香农总结归纳出的信息论提出了信息的概念以及如何从数学上度量信息,信息论可以说是现代人类文明的基石之一。解释清楚信息的本质之后,人们才能够用数学表示一个朴素而又深刻的原理:信息可以用来估计状态,越多的信息可以把状态量估计得越准。
(上图致敬信息论之父,克劳德-香农)
此后,控制论的奠基人诺伯特-维纳、鲁道夫-卡尔曼以及其他一大批工程师和科学家完善了通过信息进行状态估计的线性估计理论,进一步提出了传感器之间"互补滤波",共同减小误差的理论。卡尔曼设计的卡尔曼滤波器还被实现在了阿波罗飞船的导航计算机当中,使用星座位置和惯性测量元件互补测量阿波罗飞船的十五个状态量。
信息论、线性估计理论以及卡尔曼滤波器允许人们把多个具有误差的传感器通过数学方程融合起来,利用传感器信息估计特定的状态量,而且越多传感器"互补",可以获得越好的状态估计。这样,数学给工程学指出了发展方向:造更多牛逼的传感器进行互补,就能获得更好的状态估计能力。大疆飞控总工程师鱼大人也曾经说过:"最牛逼的工程师都是在搞传感器。"传感器技术的重要性可见一斑。
作为一种位置传感器,GPS具有诸多的问题,GPS信号只有在开阔的空间内才能给出比较好的测量值,因为GPS接收机需要从天上的卫星获得信号,这些信号要从太空传入大气层,这么远的距离,信号已经相对来说很微弱,所以必须要求接收机和卫星之间的连线上没有遮挡,一旦有建筑甚至是树木的遮挡,卫星发下来的信号就有噪声,GPS接收机就不能给出很好的位置和速度观测。在室内环境中,GPS甚至完全不能使用。组合导航技术要想进一步发展,就需要寻找其他能够在GPS不能使用的环境中使用的传感器。
一种较为简单的能够替代GPS测量高度的传感器是小型超声波模块。这种模块通常有一收一发两个探头,一个探头发出超声波,另一个探头
- 让AI前往广袤宇宙,NASA为人类寻找下一个家园(07-31)
- 大热的四轴飞行器设计,提供软硬件参考方案(09-20)
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)