速度与激情7,看传感器如何复活保罗沃克
知道《速度与激情7》在中国的上映时间后,笔者第一时间就买了午夜首映场的电影票。说起来,我算不上铁杆的《Furious》粉,但是这些年一路看过来,《速度与激情》系列之于我更像是一种习惯。习惯了银幕上的每次驰骋,每一次虎口脱险,每一次 Happy Ending。而这一部,也因为是 Paul 的"最后演出"而变得更有特殊的意义,而这一切也都得益于电影的特效技术。
为了弄清保罗·沃克"复活"的实现方式,小编搜索了网上有关《速度与激情7》的 CG 技术,分析比较全面的一文是:
首先保罗·沃克的两个弟弟柯迪和迦勒确认出演保罗替身,导演温子仁也从保罗生前作品中精选出片段。昔日的影像资料和相貌相似的替身为特效公司采集面部表情提供了不可替代的帮助。然后通过 CG 技术制作出多角度的脸部模型,并制作出所需要的多个虚拟表情。最后将表情相连,生成动态影像。除此之外,保罗的声音也被采集出来,在其弟弟的帮助下,完成了整个影片中布莱恩的配音。

短短百字,如何涉及到该项 CG 技术的核心呢?替身的一举一动为何在电影里就成了保罗·沃克的行动?这可不是有些功夫片里简单的镜头切换!

出于专业所限,小编只能通过专利检索,为大家解析"复活"背后的那些专利技术。
一、"动作、表情捕捉"技术
1、早期的光学捕捉技术
由专利申请号为 200580047644.5 号的专利可知,早期的"动作捕捉"和"表情捕捉"是分别进行的,但是这样分开捕捉会失去面部动作和身体动作之间的联系,会使电影画面看起来不真实。随着现在科技的发展,使得捕捉技术可以实现动作和表情的同步捕捉!
通过检索到的信息,在电影拍摄过程中,动作和表情同步捕捉的技术原理是这样的:行动者穿着具有附着在各个位置的标志(例如具有附着到身体、四肢和脸部的反射标志)的衣服(下图的白色光点),在照亮这些标志的同时,由面部动作摄像机(图中代号 14)和身体动作摄像机(图中代号 16)检测这些标志,并从不同的角度纪录行动者的运动。然后由捕捉系统(即主机)分析这些图像以确定在每一帧中行动者的衣服上的标志的位置(例如按空间坐标)和方向。通过跟踪这些标志的位置,该系统创建这些标志随时间变化的空间表示并且建立运动中的行动者的动作和面部表情的数字表示。然后,将该运动构建成数字模型,可以用于电影中行为的完整的 CG 表示。详细图示:
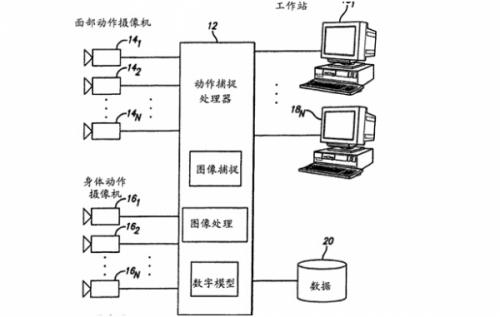
(整个捕捉系统示意图)

(拍摄原理俯视图)
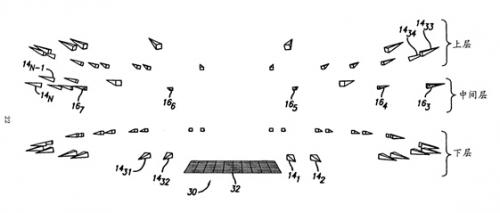
(拍摄原理正视图)
"拍摄原理图"中"三角锥形"代表摄像机,分别从上、中、下三层进行拍摄。"14n"代表面部动作摄像机,"16n"代表身体动作摄像机。可以根据需要对摄像头数量进行调整,但不易过少,最少也要 8 个相机,否则容易导致盲点。

(实际拍摄现场图)
上方所示"实际拍摄现场图"中的白点即原理中所提的标志,后方红点是高清拍摄摄像机。
2、传感器身体动作捕捉技术
传感器捕捉技术暂且只能捕捉身体动作,对于具有细微特征的表情尚且难以做到。通过检索到的专利技术可知,基于传感技术的身体动作捕捉系统包括用于完成动作捕捉过程的主体部分和用于动作捕捉过程中辅助工作的辅助部件。主体部分包括 17 个惯性传感器节点、主控机和无线收发器;辅助部分包括传感器节点充电器。
17 个惯性传感器节点用于分别一一对应的设置在人体的骨骼上划分的 17(根据人体运动分解模型)个信息捕捉节点上,17 个惯性传感器节点用于分别测量人体不同位置点的运动情况(不同的方向:如三个互相垂直的方向X、Y和Z;);17 个惯性传感节点通过无线方式与无线收发器通信,无线收发器与主控机相连,无线收发器用于接收所有惯性传感节点所发送的数据,并将数据转交给主控机进行滤波、数据融合等处理,最后得到节点的运动数据,再根据这些运动数据制作行为的数字表示。详细图示:
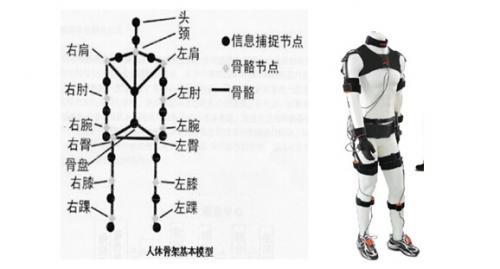
(人体骨架基本模型和带有传感器的服装)
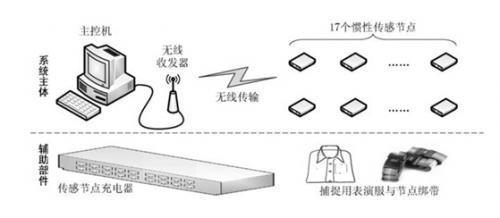
(整个系统示意图)
二、主演与替身的"换头"技术
通过检索索尼电影娱乐公司申请号为 200780049051.1 的专利可知,早期的"换脸"过程应该是这样的:
首先获得替身演员头部的3-D模型,此可以通过利用激光扫描生成纹理图来获得该模型。
第二步,通过展开由激光扫描生成的脸部纹理,来将这样获得的3-D 模型展开成2-D 形式。
第三步,利用至少一个已知图案(真正演员)来替换2-D形式中的替身演员脸部特征的细节。
第四步,将带有已知图案的2-D 纹理图案再转换成3-D 形式通过计算机等软件替换到捕捉到的替身身上。
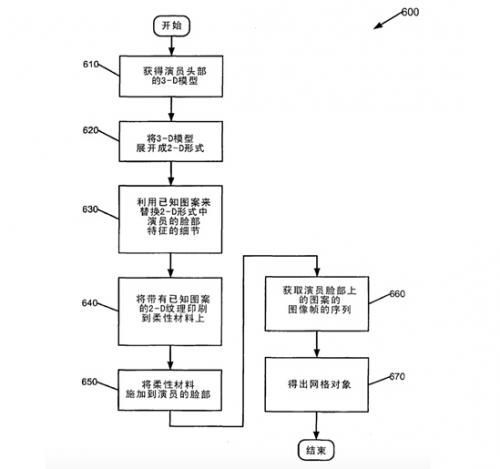
(原理流程示意图)
目前,技术的发展已经不需
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)