基于DSP和FPGA的机器人声控系统设计与实现
|
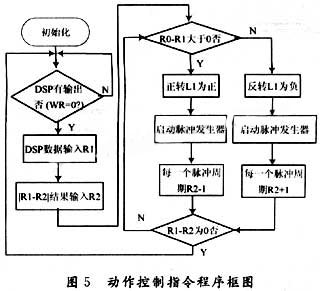
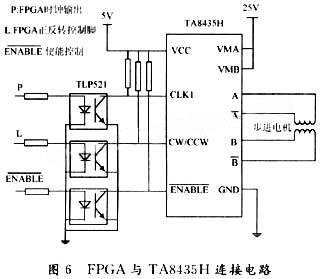
其中R1为DSP指令寄存器,R2为当前坐标寄存器,通过DSP的输出坐标与FPGA的当前坐标进行差值运算来确定步进电机的旋转方向和旋转角度,优点是可以根据新的输入指令的变化,结束当前动作以运行新的指令,指令执行完毕后,系统清零,步进电机回到初始状态。 4.2 FPGA逻辑仿真 FPGA以MAX-PLUSⅡ开发平台,用语言为VHDL语言对上述逻辑功能进行设计,并通过JTAG接口进行了调试,FLEXl0KE芯片能够根据DSP输出指令输出正确的正反转信号和脉冲波形。 4.3 步进电机驱动设计 FPGA通过P1,L1,P2,L2输出控制控制步进电机驱动芯片。步进电机驱动采用的是东芝公司生产的单片正弦细分二相步进电机驱动专用芯片TA8435H,FPGA与TA8435H电路连接如图6。
|
- 一种基于电力线的家庭以太网络实现方法(10-10)
- 面向大众市场的千兆位级收发器(05-04)
- 利用以太网硬件在环路实现高带宽DSP仿真(05-04)
- 采用软处理器IP规避器件过时的挑战(05-04)
- WCDMA系统基带处理的DSP FPGA实现方案(01-02)
- FPGA设计开发中应用仿真技术解决故障的方法(06-22)