一种新型逆变器及其滑模控制
传统单相桥式逆变器作为一种常见的拓扑结构,在许多领域得到了广泛应用。然而,该拓扑的输出逆变电压幅值必须低于输入直流电压,当应用在输出电压高于输入电压的场合时,须增加一级Boost电路来提高直流电压,这会导致逆变器成本、体积和电路复杂性的增加,同时也降低了其传输效率。为此,参考文献[1-3]提出Z源逆变器,其输出电压可高于或低于直流电源电压,且无桥臂直通问题。但 Z源逆变器是在传统桥式逆变器前加了一个Z源网络,其成本和效率问题依然没能很好地解决。参考文献[4-6]对双Boost逆变器进行研究。双Boost逆变器由两个同步Boost级联而成,这种逆变器的输出电压可高于或低于直流电源电压,因而在实用中有更大的灵活性,同时降低了成本,简化了电路。但是该逆变器的两个Boost需要协调工作,每个Boost的两个开关之间需要加入死区时间,因此控制起来相对复杂,且四个开关都工作在高频状态,开关损耗较大。
本文在双Boost逆变器的基础上提出了一种新型逆变器,该逆变器只需要一个Boost电路和一个换向桥。其输出电压可高于或低于直流电源电压,拓扑结构较双Boost逆变器简单,整个拓扑只有一个开关工作在高频状态减少了开关损耗,且不存在两个Boost控制协调的问题。故其拓扑结构和控制结构都相对双Boost逆变器简单。
滑模控制具有很好的自适应性和较强的鲁棒性,能很好地满足高性能要求的场合[7]。为此本文在提出新型逆变器的基础上,对该逆变器的工作进原理行分析,并对其滑模控制进行了研究。
1 基本工作原理及其等效电路的状态空间方程
新型逆变器及其控制电路如图1 所示。图中L 为电感,C 为电容,uO为输出电压,iC为电容电流,S0~S4
为功率开关管,Ud为直流输入电压,u* 为参考电压,R 为负载阻抗。
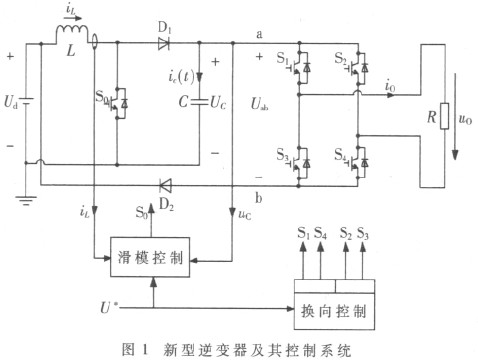
1.1 基本工作原理
该逆变器是由一个Boost 加一个全桥换向电路构成, 换向桥输入端下面一端(b 点) 接在输入电压的正端,
以提供直流偏置电压。定义正弦波取绝对值后的波形叫正幅正弦波。由于Boost 所能产生的最小电压为输入电压Ud, 为得到图2中Uab所示正幅正弦波, 参考信号u* 必须在正幅正弦波上叠加一个大小为Ud直流参考信号, 这样可以在电容C上产生对应该电压波形Uc。由于b 点电位为Ud, 所以抵消了在Uc上的直流分量Ud, 从而得到如图2 所示Uab的波形。由于Uab的波形为正幅正弦波, 所以要将其变为交流正弦波, 才能得到所需要的输出电压。此时, 可以通过S1~S4全桥电路实现不断换向来得到交流输出电压。由图2 可知, 输出应为正半波时, 为S1和S4导通。输出应为负半波时,S2和S3导通。可以看出, 换向桥功率开关的频率等于输出电压的频率, 其工作频率十分低, 这样使得整个系统只有一个开关S0工作在高频状态, 相对于有4 个高频开关的双Boost 逆变器和Z 源逆变器, 新型逆变器的开关损耗得到大大减小, 系统效率相对提高。
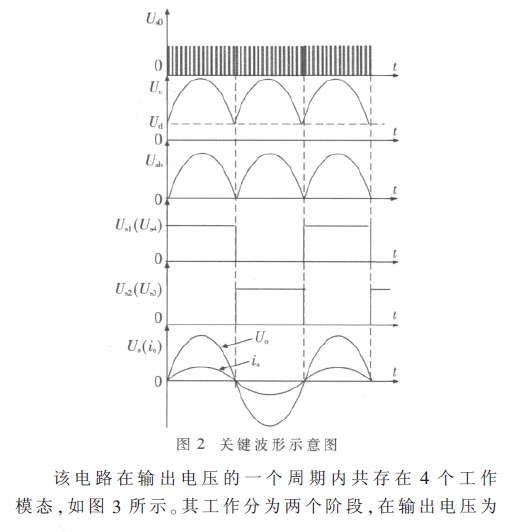
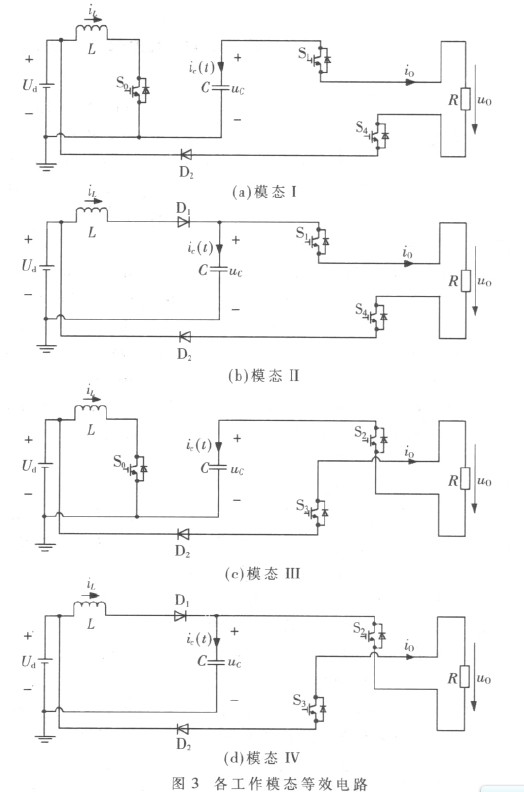
正半波的阶段, 模态I 和模态Ⅱ 不断重复。在输出电压为负半波的阶段, 模态Ⅲ 和模态Ⅳ 不断重复。具体分析如下:
(1) 模态I: 此时由于输出电压为正半波, 故S1 和S4导通, 从而加在电阻上的电压为正。此阶段S0 闭合, 输
入电源给电感L 充电, 负载R 由电容C 供电。
(2) 模态Ⅱ : 此时由于输出电压为正半波, 故S1 和S4 保持导通, 从而使加在电阻上的电压为正。此阶段S0
断开, 电感L 充电给电容C 充电, 同时给负载R 供电。
(3) 模态Ⅲ : 此时由于输出电压为负半波, 故S2 和S3 导通, 从而使加在电阻上的电压为负。此阶段S0 导
通, 输入电源给电感L 充电, 负载R 由电容C 供电。
(4) 模态Ⅳ : 此时由于输出电压为负半波, 故S2 和S3 保持导通, 从而使加在电阻上的电压为负。此阶段S0
断开, 电感L 充电给电容C 充电, 同时给负载R 供电。
1.2 等效电路的状态空间方程
通过对该电路4 个模态的分析, 可以得出滑模控制对象的等效电路, 如图4 所示。由于4 个模态中无论电
阻方向如何变化, 对于前一级Boost 来说, 都相当于一个电阻负载。此外, 由于b 点电位已经被抬升至Ud, 所以Boost 的输出相当于一个电阻串联一个电压源Ud。其控制的目标是要使Uab输出正幅正弦波, 所以要控制Boost的输出电压UC与负载电压UO1满足如下关系:
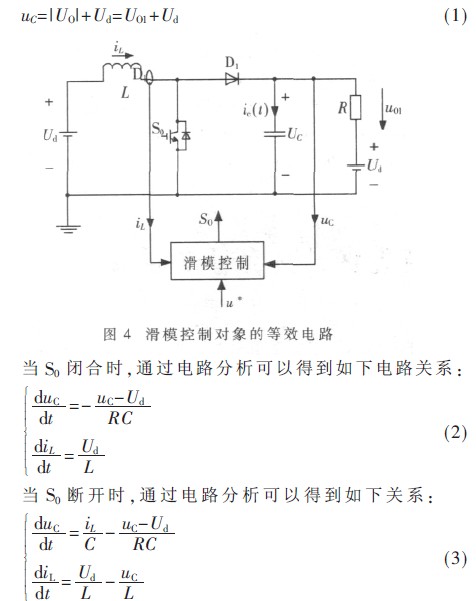
取电容电压和电感电流作为为系统的状态变量来描述系统, 结合上述分析可得等效电路的状态空间方程为:

在图4 所示的Boost 电路中, 电感电流的参考量很难预先给定, 并且实际中电感电流是非线性的。为了克
服这个问题, 实际中可以采用一个高通滤波器来获得电感电流的状态变量偏差(iL-iL*)[ 8]。该方法需要注意高通滤波器的截止频率的选择, 要保证高频分量可以顺利地通过, 而电感电流的低频分量能被滤除。
- 基于滑模控制感应加热电源的电流仿真分析(10-17)
- 单电源供电的IGBT驱动电路在铁路辅助电源系统中的应用(01-16)
- DC/AC逆变器的制作(02-19)
- 快速二极管MOSFET在三相逆变器拓扑中的应用(06-17)
- 基于DC/DC软开关技术的充电机在铁路辅助电源系统中的应用(05-23)
- Z源型光伏并网逆变器研究(09-17)