新型直线电机运输系统开关电源设计
我国内蒙自治区现已查明煤炭总储量超过7000亿吨,居全国首位,其短途运输方式仍是以公路为主。但这种传统运输方式存在效率低、成本高、环境污染严重等问题,日益成为制约内蒙古煤炭工业发展的关键因素。这种情况下,新型直线电机运输系统应运而生。新型直线电机运输系统采用直线电机推进,具有爬坡能力强、占地面积少、建设经费低、运行时速快、易于实现自动控制、无噪音、无废气、运营维护和耗能费用低等优点,是21世纪理想的煤炭运输方式。
1 新型直线电机运输系统
新型直线电机运输系统采用三相PWM整流器供电,输入50 Hz,10 kV交流电,输出母线连接至线路接触网,为机车提供1 500 V直流电。车载牵引变流器将直流1 500 V转换成额定电压为530 V的三相变频变压交流电,供给直线电机初级线圈,用以产生一个行波磁场。次级导体板铺设在线路钢轨之间,机车正下方,在行波磁场的作用下导体板内感生出电流,与初级线圈磁场相互作用产生推动力,驱动机车运行。车载牵引控制器互相连接,通过无线网络与地面指挥中心进行通信,控制机车运行状态。新型直线电机运输系统整体结构如图1所示。
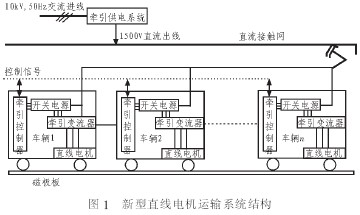
车载开关电源负责为牵引变流器、冷却风机、控制系统、闸瓦继电器等全部车载设备供电,要求其性能良好、稳定可靠。所以,设计出符合新型直线电机运输系统要求的开关电源是势在必行的。
2 开关电源设计
根据系统设计要求,开关电源输入电压为DC1 500 V,输出为DC24 V,功率2 kW。鉴于功率较小,可以选择较高的开关频率,有利于系统小型化与轻型化,提高效率,减小输出谐波。经过分析实验,初步设定开关频率为15kHz。
2.1 主电路设计
由于系统输入/输出电压等级相差悬殊,直接由BUCK降压电路降压显然不可取,因为占空比过小,只有24/1500=1.6%,控制上难以实现,同时续流电感要求很大,设计较困难,不切实际。因此,这里选择两级组合模式:前级为BUCK降压电路;后级为DC/DC变换电路-隔离变压器-全波整流电路组合。若开关频率为15 kHz,隔离变压器需要选择高频变压器。主电路结构如图2所示。
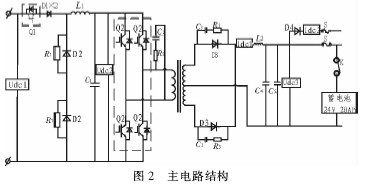
图2中,前级BUCK电路将DC1 500 V降至DC500-DC650 V,后级组合电路在此基础上进行斩波-变压-整流,输出DC24 V,波动范围22~28 V。设定DC/DC电路占空比控制范围0.3~0.45,以BUCK输出最低电压-DC/DC电路最高占空比-DC24 V输出最高电压为准,计算变压器线圈变比。原边U1=500 V,副边电压计算公式如下:

绕组变比取30,故隔离变压器变比为500:30:30,功率2 kW,额定工作频率15 kHz。
在前级BUCK电路中,储能、滤波元件电感L1、电容C1的设计十分关键,必须根据实际要求与工作状态合理设计。当BUCK电路输出额定电压DC600 V,满功率运行时,等效负载电阻为:
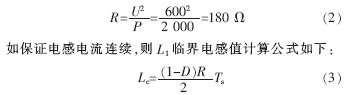
其中,D为开关管Q1占空比600/1 500=0.4;R为等效负载电阻,取180 Ω;Ts为开关周期,取1/15 000 。将以上数据代入公式(3),得临界电感值Ls=3.6 mH。由于系统输入侧存在短时掉电现象,再上电时就会在电感、电容上出现电流、电压冲击(见本文2.4小节),因此这里在选择电感L1的值时,要在基础上乘以一个抑制冲击系数,取1.4,得到:
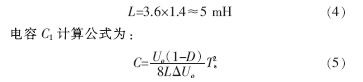
其中,Uo为输出电压,取600V;L为电感L1的值,取5mH;△U,为输出纹波电压,这里取1%,即600x0.001=0.6 V。代入公式(5)得电容C1值为:

又如前所述,系统输入侧存在短时掉电-再上电现象,为了限制冲击电流大小,必须使电容在掉电期间的压降尽可能小,故设定经10 ms掉电后,电容电压下降至580V。

上式中,Uc为电容电压,取580 V;U为电容初始电压,取600 V;τ=RC,R=180 Ω;t为掉电时间,取10 ms。代入公式(7),得,C=1 639 μF,取C=1 700μF。
对于本系统中使用的开关器件,考虑到电压等级和工作频率的关系,最终选择IGBT作为开关器件。对于前级BUCK电路的IGBT,其额定电压计算公式如下:
Un=Uin×K1×K2 (8)
其中,Uin是输入额定电压,取1 500 V;K1是网压波动系数,此处取1.3;K2是必要的电压安全系数,一般取1.3~1.5,这里取1.5。计算得:
Un=1 500×1.3×1.5=2 925 V (9)
开关电源满载时,BUCK电路一个开关周期中电感电流,即Q1电流达到最大值为:

代入前文求出的L、D、Ts的值,得:Imax=4.8 A。因为要留有一定裕量应对冲击电流,因此BUCK电路Q1需要选择3 300 V、20A等级的IGBT。
DC/DC变换电路IGBT额定电压、额定电流的计算相对较简单,故在此不做赘述,只给出结论:Q2需要选择1 200 V、15 A等级的IGBT。
2.2 控制系统设计
内蒙新型直线电机运输系统采用数字控制系统,以TI公司的TMS320F28335型DSP芯片和ALTERA公司的Cyclone型FPGA芯片共同构成控制系统的核心。该控制系统主要包括6大模块:主控模块、A/D采样与调理模块、DI与DO模块、LED显示模块、IGBT脉冲驱动模块以及通信模块。系统整体结构如图3所示。
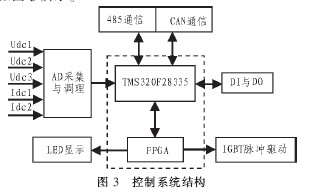
主控模块包括DSP和FPGA两部分,负责A/D转换、DI/DO控制、PI控制、逻辑判断、软件保护、硬件保护、与上位机通信、发生IGBT控制脉冲、控制LED显示特定信息等,是控制系统的核心:A/D采样与调理模块负责将主电路中传感器输出的小电流信号转换成小电压信号,再经过滤波、限幅电路,接入DSP的A/D转换接口,为控制系统提供系统当前工作状态;DI与DO模块可以实现I/O信号的输出与检测,主要用于继电器控制和开关状态反馈;LED显示模块由7段显示数码管组成,可根据主控模块指令显示电源当前工作状态和故障信息;IGBT脉冲驱动模块将IGBT控制脉冲进行推挽放大,增大其驱动功率,控制IGBT通断。同时模块内设有保护功能,对IGBT进行过流、过温保护;通信模块负责与DSP共同完成同上位机之间的485/CAN通信。6大模块分工协作,共同保证了控制系统的高效、稳定运作。
2.3 控制策略
文中所设计开关电源采用两级电压闭环控制模式。由主电路中的电压传感器检测电压反馈值,经过A/D调理,送入DSP芯片进行A/D转换,利用其强大的计算能力实现数字化PI调节,完成电压闭环。DSP实时生成下一刻开关管的占空比指令,FPGA负责发生IGBT控制脉冲。前级电压闭环将DC1 500 V降至DC600 V,后级电压闭环将DC600 V变至DC24 V,两级闭环结构相同,互不影响。公式(11)~(16)所示为DSP芯片中PI调节模块计算过程。
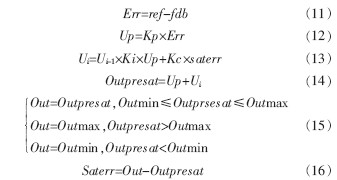
图4所示为PI调节模块的结构图。
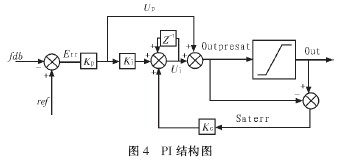
除了以上阐述的传统PI控制,本系统还应用了前馈补偿的思想,不再只以PI决定控制脉冲占空比,加入了前馈补偿计算结果,使得控制系统的反应速度更快。PI调节模块作为"微调",使得输出电压纹波系数更小,稳定性更佳,有效抑制了系统因冲击、震荡所引起的输出剧烈波动。具体应用方法如公式(17)所示。

上式中,D为最终IGBT控制脉冲占空比;PLout为PI调节模块计算结果;Uref为前馈补偿计算给定值,这里取各级电压闭环的额定输出电压;Uin为前馈补偿计算输入值,这里取各级电压闭环的输入电压。因此,Uref/Uin即为前馈补偿计算结果。
2.4 保护策略
如前文所述,内蒙新型直线电机运输系统试验线存在弓网关系差的问题,在某些区段频繁出现短时掉电-再上电的现象,进而在前级BUCK电路的电感、电容上产生冲击电流、冲击电压。其中,尤以冲击电流对系统的损害作用最大。经仿真,采用前文所选电路器件参数和闭环控制策略,10 ms脱弓情况下,电流冲击一般会达到90A。除此之外,系统还可能出现各种过压、过流故障。因此,采取有效的保护策略,抑制冲击电流过大,保证系统稳定是十分必要的。具体保护逻辑如下:
1)输入过压——封锁全部控制脉冲,过一段时间后(10 s)进行检测,若此时并无过压情况,则重新启动脉冲。DC/DC变换电路直接恢复至保护前占空比,BUCK电路进入软启动模式,以当前UDC600V/UDC1500V为占空比起始点,依时序逐渐增大占空比,直到DC600 V达到额定值为止。输入过压保护值取1800V。
2)输入欠压——这种故障中主要出现于网侧短时掉电情况下。输入欠压保护后,仅封锁BUCK电路控制脉冲,在控制系统每一时序周期对网压进行监测,一旦恢复正常,BUCK电路进入软启动模式,方式同I。输入欠压保护值取1 000 V。
3)DC600V过压——封锁全部控制脉冲,中间电压经由压仓电阻缓慢泄放,当低于550 V时,系统重新启动脉冲。方式同I。DC600 V过压保护值取700V。
4)输出过压、欠压——封锁全部控制脉冲,5 s后系统重新启动。如果在1分钟内重启次数超过3次,则系统停机,不再重启,人工进行故障修复。输出过压保护值取30 V,欠压保护值取20 V。
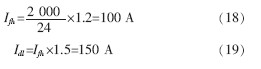
5)输出过流——当Ifh<Iout<Idl时,即输出发生过负荷,但尚未发生短路故障时,通过降低输出电压的方式抑制过负荷电流;当Iout> Idl时,即输出发生短路时,封锁全部控制脉冲,系统停机,人工进行故障修复。
- 用IGBT代替MOSFET的可行性分析(11-27)
- 以创新的IGBT技术、合理的器件选型和有效的系统手段优化变频器设计(01-09)
- 智能功率IGBT和MOSFET让汽车更加舒适环保(01-09)
- 单电源供电的IGBT驱动电路在铁路辅助电源系统中的应用(01-16)
- 面向汽车应用的IGBT功率模块浅谈(05-13)
- 使用栅极电阻控制IGBT的开关(04-13)