IPM自举电路设计难题探讨
选择耐高压的反向漏电流小的超快恢复二极管。本项目选用的自举二极管型号为BYV36C。 3 自举电容初始充电过程及控制方法
3.1 初始充电分析及实现程序
在自举电容的初始充电过程中,较大的初始充电电流有可能给系统可靠性带来不利影响。这是因为较大的电流冲击一方面对控制电源器件造成冲击,另一方面增大了初始充电阶段上下桥臂直通的风险。由此可见应当尽量避免下桥臂长时间开通的自举电容初始充电方法。
实际应用中可采用脉冲串的方法,分多次给自举电容充电,直到自举电容充满。这样可有效减小初始充电过程中的充电电流。
本项目采用瑞萨SH7125作为控制芯片,软件上采用了一种简单实用的方法实现了自举电容的初始充电。具体的做法是:在每次更新PWM占空比时,先判断占空比的值,若小于0.056,则认为电机的给定速度为零,并以此作为进入充电程序的判断条件。如下面的程序所示:
if(revison_value < 0.056)
{
MTU2.TOER.BYTE = 0x38; /*禁止上桥臂输出*/
hall.HallPointer = (hall.HallPointer + 1)%6;
MTU23.TGRD = 1900;/*设定占空比*/
MTU24.TGRC = 1900;/*设定占空比*/
MTU24.TGRD = 1900;/*设定占空比*/
pwm_calc();/*占空比更新函数*/
}
由上述程序可知,通过程序预定的方式给定直流无刷电机的换相顺序,使得 U、V、W 三相进行错位充电,即每一次只给某一相的自举电容充电并依次循环直到三相都充满。
该控制程序的优点在于上臂被禁止输出,所以不存在上下臂直通的危险,且只要占空比小于0.056时就对自举电容充电,能保证自举电容能充满。通过将初始充电控制语句放在PWM更新函数里,保证了初始充电的实时性,很好地解决了实现自举的关键问题。
3.2 自举电压波形及分析
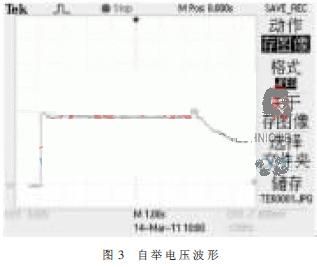
图3是实测的自举电压波形。由图3分析可知,初始充电近似阶跃函数。在0.1 s时,就能充电到14 V,即上述初始充电程序能快速完成初始充电;在0.2 s时,电机开始运行,自举电容放电。由图3还可知,在运行阶段,自举电容电压基本稳定在14 V,几乎在电机停止的瞬间,自举电容电压迅速充电到15 V,然后开始慢慢放电。
由上述分析可知,本项目采用的自举电容初始充电的方法简单实用,在实际项目应用中取得良好的效果。
本文分析了自举电路的基本原理,保证了充电的实时性,在应用中取得了良好的IPM驱动效果,为自举电容的初始充电提供了一个简单实用可靠的方案。总之,要在理论指导的基础上,使得控制算法和硬件参数紧密相关,并在实际系统反复调试并最终确定参数,以便最大程度地保证电路的可靠性。
- Sentry Equipment公司利用LED实现能源效率(11-19)
- IPM驱动和保护电路的研究(07-26)
- IPM(02-13)
- TMS 32OF2812与DIP-IPM的通用电路设计(08-14)
- 针对绿色模式应用的自举电路(05-06)
- 自举电路增大输入阻抗的方法解析(01-24)