AVS逆扫描反量化和反变换模块的硬件设计
AVS标准是我国第一个拥有自主知识产权的数字音视频编解码标准,其编码效率比国际标准MPEG-2高2~3倍,与MPEG-4/H.264相当,但算法复杂度及存储要求比H.264明显低,更便于硬件的实现。
逆扫描、反量化与反变换模块在AVS视频解码过程中占有很重要的位置,其算法与架构实现优劣对AVS解码器的性能有很大的影响,国内外学者对这3个模块进行了研究。本文为了提高AVS解码器的处理速度,综合了国内外学者的设计思想提出了一种逆扫描、反量化与反变换模块结构,在消耗逻辑资源允许的情况下提高了处理速度,做到速度和面积的平衡。
本文将逆扫描、反量化和反变换模块结合在一起进行设计,在实现了块内部优化的同时采用了乒乓缓存寄存器组来实现块之间流水线,提高了速度;采用寄存器组复用技术实现逆块扫描中寄存器组与反变换中的转置寄存器组的复用,节省了寄存器资源。
1 硬件结构
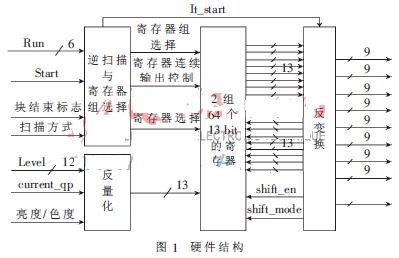
根据AVS解码标准,本文提出了一种高效简洁的逆扫描、反量化与反变换系统结构,该结构主要由四部分组成。反量化模块完成量化系数向变换系数的转变;逆扫描与寄存器组选择模块根据逆扫描表完成变换系数的存储;寄存器组用来存储变换系数及反变换中的转置数据;反变换模块将变换系数转换成残差样值,为后续的重构做好准备。硬件结构及数据流程如图1所示。
AVS标准是我国第一个拥有自主知识产权的数字音视频编解码标准,其编码效率比国际标准MPEG-2高2~3倍,与MPEG-4/H.264相当,但算法复杂度及存储要求比H.264明显低,更便于硬件的实现。
逆扫描、反量化与反变换模块在AVS视频解码过程中占有很重要的位置,其算法与架构实现优劣对AVS解码器的性能有很大的影响,国内外学者对这3个模块进行了研究。本文为了提高AVS解码器的处理速度,综合了国内外学者的设计思想提出了一种逆扫描、反量化与反变换模块结构,在消耗逻辑资源允许的情况下提高了处理速度,做到速度和面积的平衡。
本文将逆扫描、反量化和反变换模块结合在一起进行设计,在实现了块内部优化的同时采用了乒乓缓存寄存器组来实现块之间流水线,提高了速度;采用寄存器组复用技术实现逆块扫描中寄存器组与反变换中的转置寄存器组的复用,节省了寄存器资源。
1 硬件结构
根据AVS解码标准,本文提出了一种高效简洁的逆扫描、反量化与反变换系统结构,该结构主要由四部分组成。反量化模块完成量化系数向变换系数的转变;逆扫描与寄存器组选择模块根据逆扫描表完成变换系数的存储;寄存器组用来存储变换系数及反变换中的转置数据;反变换模块将变换系数转换成残差样值,为后续的重构做好准备。硬件结构及数据流程如图1所示。
其中输入为VLD模块解析出的(run,level)对、块结束标志及一些模式判别的信息。反量化模块对Level数据进行反量化,逆扫描与寄存器组选择模块采用依据轮流使用的规则产生寄存器组选择信号,同时对Run进行累加,并根据累加结果查表得到需要存储的寄存器,等所有量化后的Level值存储完毕后,由It_start信号连续读取8次寄存器进入反变换模块,反变换模块采用内部流水线结构经过22个时钟周期处理完一个块。反变换模块中的转置寄存器复用了前端的寄存器组。
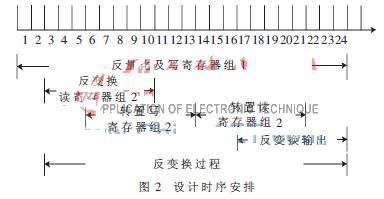
本设计通过乒乓结构实现了块与块之间的流水。图2是本设计的总体时序安排,图中考虑到变换编码后一个块内的有效系数一般小于25。其中以一个块数据输入反量化模块作为起始时刻,当反变化模块读取一个寄存器组并将其作为转置寄存器使用时,另一个寄存器组用于存储下一个块的反量化结果。如图2,寄存器组1用来存储当前块反量化后的变换系数值,而寄存器2被用于上一个块的反变换中。另外,读取转置后的数据时,通过对移位最初的寄存器赋零对寄存器2清零,从而用于下一个块的变换系数的存储。
1.1 逆扫描与寄存器组选择模块
该模块先对Run值进行累加,并根据扫描方式查表,得到当前Level值所对应的寄存器号,控制将反量化后的变换系数存入相应寄存器中,重复以上工作直到读到块结束标志。当前块不为零的所有变换系数均根据逆扫描表存储在相应的位置,因为每次从寄存器中读取转置数据时都会对寄存器清零,为下次使用做好准备,所以对于变换系数为零的情况就不用单独存储,从而提高了设计的处理速度。
1.2 反变换模块
反变换模块是将当前块的变换系数矩阵转换为残差样值矩阵的一个过程,为了节约硬件成本,此设计采用一维变换和转置矩阵实现二维变换,参考文献[2]中提出了一种快速有效的方法,本文对其方法进行了优化,节约了不必要的硬件资源和时钟。
下面主要介绍一维变换过程。
设AVS的一维反变换的输入输出变量分别为:
X=[X0,X1,X2,X3,X4,X5,X6,X7]T
Y=[Y0,Y1,Y2,Y3,Y4,Y5,Y6,Y7]T
根据Y=T8×X,把8个输出元素展开成以下组合,其中T8为8×8的反变换矩阵。
M0=8X0+8X4;M1=8X0-8X4
M2=4X1+4X5;M3=9X1-10X5
M4=6X1+2X5;M5=2X1+9X5
M6=10X2+4X6;M7=4X2-10X6
M8=9X3+2X7;M9=2X3+6X7
M10=10X3-9X7;M11=4X3+4X7
其中所有的乘法均可化为移位操作,再定义8个中间变量N0~N7:
N0=M0+M6;N1=M2+M8+M4
N2=M1+M7;N3=M3-M9
N4=M1-M7;N5=M4-M10
N6=M0-M6;N7=M5-M11-M9
重新整理后得到的输出:
Y0=N0+N1;Y1=N2+N3;Y2=N4+N5;Y3=N6+N7
Y4=N6-N7;Y5=N4-N5;Y6=N2-N3;Y7=N0-N1
由以上算法可以看出,一维反变换模块只需要移位和加法操作,既方便硬件实现还节省了硬件资源。经计算此一维反变化模块共需要40个加法器。
反变换模块的时序见图2,第1时钟周期进行并行读取数据,2个时钟周期进行一维反变换,第4个时钟周期开始向转置矩阵中存入一维反变换后的数据,第12周期开始读取转置矩阵中的数据,第15个时钟周期开始输出数据,第22个时钟周期结果输出完毕。
- AVS产业联盟介绍(10-08)
- 数字音视频编解码技术标准工作组(10-08)
- 视频编码标准的发展和研究(10-09)
- AVS 的技术特征及应用前景(10-09)
- AVS视频标准研究(10-09)
- AVS 运动补偿电路的VLSI 设计与实现(10-09)