基于的DSP的逆变电源模糊PID控制
0 引言
由于逆变器传递函数不易得到,而且电压输出经常波动,传统的单纯PID控制难以达到快速和稳定的响应,而模糊控制与PID相结合的控制方法,通过对误差量的变化实时分析,调整PID参数,达到快速响应和无差跟踪,可实现逆变电源的高精度实时控制。
1 模糊控制系统原理
模糊PID控制器以电压偏差e 和偏差变化量ec作为输入,PID 参数模糊自整定是找出PID 三个参数与e 和ec 之间的模糊关系,在程序运行中通过不断检测e 和ec,根据模糊控制原理对三个参数进行在线修改,以满足不同e 和ec 对控制参数的不同要求,从而使被控对象有良好的动、静态性能。其在线自校正工作流程如图1所示。
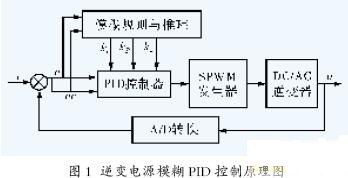
图中:ki、kp、kd分别为积分增益系数、比例增益系数和微分增益系数。
1.1 PID调整控制器
图1 中r 为给定参考电压,u 是逆变器实际输出电压,e 是偏差信号,ec 是偏差变化率。模拟形式的PID控制算式为
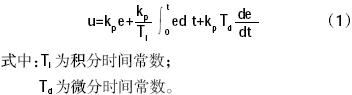
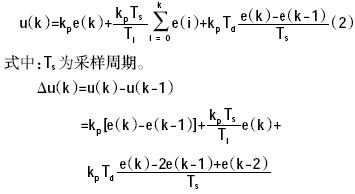
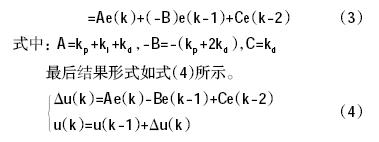
本文采用TMSLF2407实现数字PID控制,对式(1)进行离散化,可得到式(2)PID 控制的离散形式,为了增加系统的可靠性,采用增量式PID控制算式,式(2)为第k 次PID控制器的输出量,减去第k-1次PID 控制器的输出量即可得到式(3)增量式PID 控制算式。
1.2 模糊PID的实现
DC辕AC逆变电源控制的主要是输出电压及频率的准确性。频率的准确性由PWM发生器决定(它是一个存贮在存储器内的一个正弦输出表格),只要触发计算准确就能达到设计要求。负载的变化使输出电流产生变化,对于一定脉宽输出的DC辕AC电源来说,势必导致输出电压的变化。因此采用模糊控制规则根据不同的渣e渣和渣ec渣,对PID控制器的参数kp、ki、kd进行在线自整定来调节输出电压。模糊控制器的输入变量是偏差绝对值渣E渣、偏差变化率绝对值渣EC渣。
模糊控制器的输出是PID 控制器的比例增益系数KP、积分增益系数KI和微分增益系数KD。本文采用CRI(Compositional Rule of Inference)推理法设计模糊规则,为了在实时控制中避免关系矩阵的合成运算,先在脱机状态下把所有可能的输入和输出情况计算出来,形成一张控制表去执行控制,控制表是以整数形式表示的,为了能产生控制表,在CRI推理法中把语言变量的论域转换成有限整数的论域,本质上是把连续论域离散后产生离散论域。采用式(5)可以将连续域离散化到整数论域N。
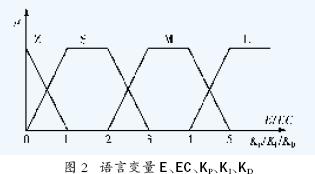
本文中,各语言变量的挡数均为4 挡(零、小、中、大),因此取整数论域N 为{0,1,2,3,4,5,6}。此时,如图2所示,可取语言变量值4挡如下:
大(L)———取在5、6附近
中(M)———取在3、4附近
小(S)———取在1、2附近
零(Z)———取在0附近
在本文中利用CRI法推理时,控制过程是用查控制表来产生控制量的,在控制表中,模糊偏差量渣E渣、模糊偏差变化率渣EC渣,PID控制器的模糊比例增益系数KP、模糊积分增益系数KI和模糊微分增益系数KD都是用其对应整数论域的元素来表示的。对于单个实时精确量利用式(5),得到的结果再四舍五入,就求出了对应整数论域的相应元素,从而实现了输入量的模糊化。
针对不同的e 和ec,kp,ki,kd的整定原则为:
1)当渣e渣较大时,为使系统具有较好的跟踪性能,应取较大的kp与较小的kd,同时为避免系统响应出现较大的超调,应对积分作用加以限制,通常取ki=0。
2)当渣e渣和渣ec渣中等大小时,为使系统具有较小的超调,kp应取小一些,在这种情况下,kd的取值对系统的影响较大,应取小一些,ki的取值要适当。
3)当渣e渣较小时,为使系统具有较好的稳定性能,kp和ki 均应取大些,同时为避免系统在设定值时出现振荡,并考虑系统抗干扰的性能,当渣ec渣较大时,kd可取小些;渣ec渣较小时kd可取得较大些。
- 8位高速A/D转换器TLC5510的应用(02-16)
- 改善平板显示器的音频性能(02-13)
- 运算放大器的选择(03-18)
- 单端数字音频放大器设计和应用考虑的要素(05-19)
- 为网络监控摄像机设计合适的电源(05-20)
- 改善可编程增益放大器性能的一个技巧(05-21)