智能同步整流控制IC-IR1166/7A-B
开关电源技术中,使系统效率提升最明显的是同步整流技术,应对不同的电路拓朴有不同模式的同步整流控制方法,但至今为止,多数同步整流控制IC需要从初级侧取同步信号,这给同步整流设计工作带来一定的繁锁。IR公司购买专利技术新开发的IR1166/7A-B则是一款能从电源变压器二次侧检测信号作智能式同步整流的控制IC,它不仅不需要从初级侧传输信号,而且能适应多种电路拓朴,适应定频PWM及变频PWM,因此它的问世及应用是开关电源技术的又一大进步。
1 主要特点
IR1167系在开关电源二次侧专用于驱动同步整流MOSFET的控制IC,且能适应DCM、CCM以及多种电路拓朴。可以工作在定频及变频两种模式,也能用于不对称半桥电路的同步整流,其主要特色有:
◇适应反激变换器的DCM、CRM及CCM三种模式工作,还适用于LLC式半桥。
◇具有最高500kHz工作频率。
◇可提供总计7A(IR1166为4A)的输出驱动及关断峰值电流(2A源出5A漏入)的能力。
◇其栅驱动输出电压在10.7~14.5V。
◇可提供50ns关断比例延迟。
◇VCC电压从11.3~20V。
◇可直接检测MOSFET的源漏电压。
◇符合低于1W的Standby能量之星的要求。
2 引脚功能
IR1166/7A-B共有8(PIN)个端子,其主要引脚功能如下:
1PIN VCC IC供电端,内部有欠压锁定及过压关断保护。在VCC电压低于11.3V时关断,高于20V时关闭,为防止噪声干扰,必须在紧靠IC处加一个足够大的旁路电容。
2PIN OVT偏置电压调整,OVT端用于调节关断阈值VTH1的偏移量。此端可选择接到GND,或接到VCC,或令其浮动,共三种输入偏置调整。此特色可以应对不同水平的MOSFET的RDSON。
3PIN MOT最小导通时间,MOT调节端控制最小导通时间的总量,一旦VTH2穿过第一时间,即给出栅驱动信号,令整流MOSFET导通,因为虚假信号及振荡也会触发输入比较器,所以MOT用于消隐比较器保持MOSFET导通,且维持一个最小时间。MOT调节范围在200ns到3μs之间,与地之间接一支电阻即可实现调节。
4PIN EN使能端,此端可使IC进入休息模式,将电压拉到2.5V以下。在休息模式,IC消耗电流总量很小,当然开关功能也被禁止,无法做栅驱动。
5PIN VD漏极电压检测端,用于检测同步整流MOSFET的漏极电压,由于此端电压会比较高,必须小心处理,用合适的方法将其接到漏极,此外在此端不可作滤波或作限流,这会影响IC的性能。
6PIN VS源极电压检测端,用于检测同步整流MOSFET的源极电压,此端必须直接接于电源的GMD及IC的(7)PIN,要用Kelvin接法,尽可能靠近MOSFET的源极端子。
7PIN GND IC的公共端,内部元件及栅驱动的参考端。
8PIN VGATE栅驱动输出端,此端为IC驱动同步整流MOSFET的驱动输出端,源出能力为2A,漏入能力为5A峰值电流。虽然此端可直接接于功率MOSFET栅极,但建议加一支小电阻串入在栅回路中,特别在驱动几个同步整流MOSFET并联时,小心地保持栅驱动环路有最小的路径,从而实现最佳开关性能。
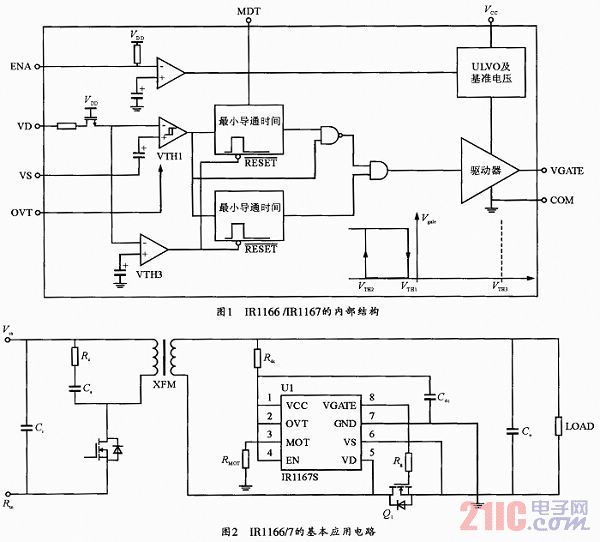
3 内部功能
IR1167的内部等效电路如图1。其基本应用电路如图2所示。
3.1 UVLO/Sleep模式
IC保持在UVLO条件之下,直到VCC端电压超过VCC开启阈值电压Vcc on。在IC处于UVLO状态时,栅驱动电路处于非激活状态。IC的静态工作电流Iccstart流过,UVLO模式在VCCUVLO时,即为此种状态,休息模式可以用将EN端电压拉低到2.5V以下。在此时,IC也只有极低的静态工作电流。
3.2 正常模式
一旦VCC超过UVLO电压,IC即进入正常工作模式,此时,栅驱动可以开始工作,Icc最大的工作电流从VCC电压源取得。
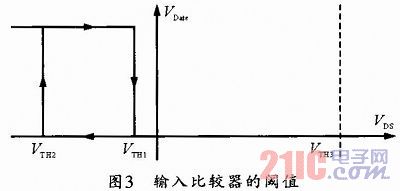
IR1167智能同步整流IC可以仿效整流二极管的工作,合适地驱动同步整流用的功率MOSFET。整流电流的方向检测由输入比较器采用MOSF-ET的RDSON作为并联电阻,且据此给出栅驱动输出,内部消隐逻辑用于防止抑制瞬态干扰,保证CCM或DCM或CRM的工作模式(见图3)。在反激式变换电路中,有上述三种电流状态。
3.3 导通阶段
当SR的MOSFET刚开始导通时,电流先经过其体二极管,产生一个负电压VDS,体二极管压降随电流而增大,IC检测此电压,在其超过VT-H2时驱动MOSFET导通,作同步整流,在这一点IR1167驱动MOSFET导通,使VDS降下来,加入一段最小导通时间MOT(minimum on time),消隐干扰,保持MOSFET导通,因而MOT还限制了初级侧的最大占空比。
3.4 DCM及CRM的关断阶段
一旦SR的MOSFET导通,会一直保持到整流电流减下来使VDS达到阈值VTH1时进入关断,这和导通时工作模式相关。
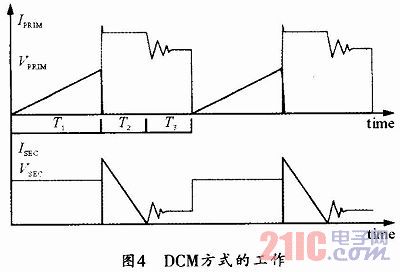
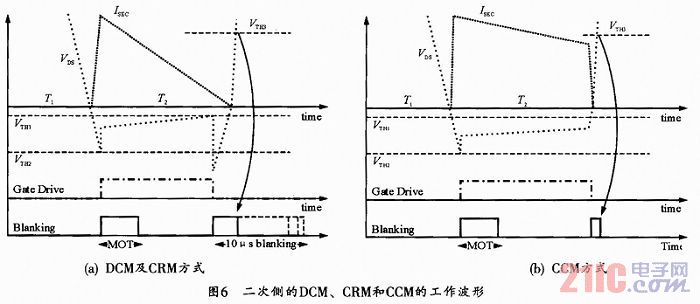
在DCM中,电流跨过阈值有相对低的di/dt。一旦跨过阈值,电流会再次流入体二极管,又使VDS电压跳向负电平,它取决于电流总量。为防VDS又去触发MOSFET到导通,在VTH2之后加入一段消隐时间tblank,在到达VTH1后。消隐时间由IC内设置。当VDS电压变正进入VTH2时,消隐时间也由IC内设置,当VDS电压变正进入VTH3时,消隐时间终止。IC进入下一周期工作。DCM模式的工作波形见图4。
3.5 CCM关断阶段
在CCM模式时,关断过程要陡峭得多,di/dt免不了会更高。导通阶段对DCM及CRM是理想的,但此时不能重复。在同步整流MOSFET导通阶段,电流将线性地衰减,因此同步整流MOSFET的VDS将升上来。一旦初级开关开始返回导通状态。同步整流MOSFET的电流会迅速减小,其压降跨过VTH阈值而关断,具体见图5。
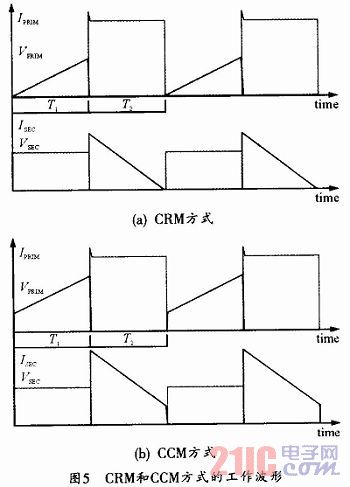
关断速度较临界,为防止初级的交叉导通,并减少开关损耗,此时要一段消隐时间加入,但此阶段要给出非常快的动作速度,随着VDS达到VTH3迅速复位。
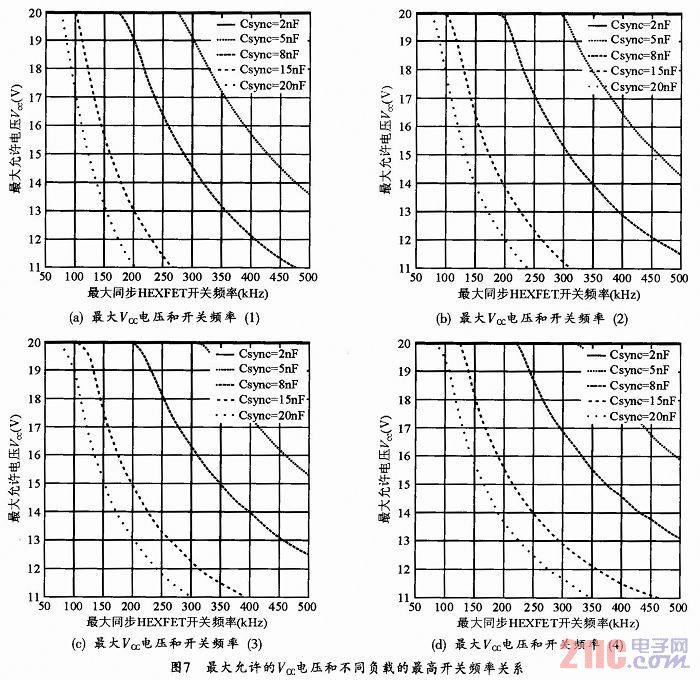
图6给出二次侧的DCM、CRM和CCM的工作波形。图7给出最大允许的VCC电压和不同负载的最高开关频率关系。
- 反激式开关电源变压器参数计算(01-04)
- 电源变压器巧处理 减小对功放的干扰(06-06)
- 电源变压器的串并联应用(09-15)
- 电源变压器简易设计方案(10-17)
- HOOD1969线路小甲DIY(01-19)
- 怪兽机器 4只电源变压器 20只RIFA大电容!(01-19)