基于数字移相器的逆变器系统相位跟踪控制
由于能源危机的不断恶化,新型能源,如太阳能、风能、核能等,越来越受到广泛的重视,并取得重大发展。这些新型能源绝大部分都要通过发电的方式转变为电能,然后并入电网,供人类生产生活使用。由于新能源发电的电力不稳定,需要通过逆变器转变为交流电。而逆变器的输出交流电流必须与电网电压同频同相才能并入电网使用。同频同相的控制效果对新型能源发电的效率与质量具有重大影响。因此,同频同相的控制方法研究已经成为电力电子技术领域一个重要的研究方向。
目前,在逆变电源并网系统中的相位跟踪控制主要采用数字锁相环技术,但控制速度慢,需要DSP、FPGA等高速器件作为控制器,而且具有成本高、控制复杂等缺点。本文针对数字锁相环的缺点,提出一种基于数字移相器的相位跟踪开环控制方法。在实验中采用MSP430F2544作为控制器模拟逆变系统,实现了同频同相跟踪控制。该控制方法简单高效,系统稳定,具有无误差频率跟踪、高精度相位跟踪的特点。
1 数字锁相环控制原理
数字锁相环技术在对电网电压的频率和相位的跟踪控制中应用较为广泛,其作用是使电网电压和逆变器的输出电流达到同步锁相,关键是实现对电网电压频率和相位的跟踪。数字锁相技术的主要方法有:先调频后调相和同时调频调相。
数字锁相环原理:假设控制器检测到逆变器输出与电网电压相位差为△ψ,T1为电网电压周期,T2为逆变器输出电流周期。令电网电压表达式为Umsin(w1t),逆变器输出电流为Imsin(w2t+△ψ)。若要使两者同频同相,须使w1t=w2t+△ψ由于w=T/2π,则可推出T2=2πT1/(2πt-△ψ)。当△ψ=0且T1=T2时即达到要求。若△ψ为正,则需增大逆变器输出电流周期T2。若△ψ为负,则需减小逆变器输出电压周期T2。当系统达到稳定时,△ψ=0且逆变器输出与电网电压周期相等。数字锁相控制系统结构图如图1所示。
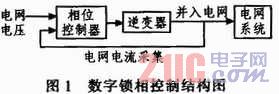
数字锁相环控制实际上是一种闭环负反馈控制方式。负反馈控制方式具有能实时跟踪环境变化的优点,但控制速度慢,而且当系统的传递函数存在极点时,系统易产生振荡。实际上当电网环境变化时,只要逆变器输出电流的频率仍处于后级滤波器的通带内,输出电流的相位延迟就不会改变,此时电网电压与逆变器的输出电流相位差与其频率有固定关系R:P=R(f)。因此只要滤波器带宽足够大,逆变器对电网的波动就有较强的免疫性。此时就可以采用开环控制方式。
2 相位跟踪开环控制原理
开环控制方式具有控制速度快,控制简单,稳定等优点。既然逆变器的输入输出有确定的相位关系,那么就可以利用数字移相器的思想进行开环控制。
数字移相器是一个其输入输出信号具有确定相位关系的系统。输入输出信号的相位差由系统本身的传递函数决定,只与输入信号的频率有关。而逆变器实际上也是一类移相器。当两个系统级联时,通过设定移相器的传递函数,使移相器输入输出信号相位差值为逆变器的相反数,那么整个级联系统就能达到输入输出信号同频同相的效果。
相位跟踪开环控制原理如下:SPWM信号的由一组离散正弦调制信号产生,相邻元素之间相位差为固定值△,利用相位累加方式输出信号,工作原理类似于DDS。设每次相位增加的时间为AT,通过改变AT,就可以改变调制信号的频率。控制器首先对电网电压进行过零捕获,测得电网电压的频率f,并根据f算出并设置△T的值,使得逆变器输出电流的频率等于f。然后每当控制器检测到电网电压的过零中断时,根据关系R:P=R(f),重新设置调制信号的相位指针Pindex为固定初始相位P。这样调制信号的频率就严格等于电网电压的频率,避免由于频率测量误差引起相位累积误差。此时,相位跟踪误差主要取决于SPWM的载波频率。相位跟踪开环控制原理框图如图2所示。

3 相位跟踪开环控制软件实现
为了安全以及简化系统设计,实验利用MSP430F2544单片机产生SPWM信号模拟光伏逆变器。
MSP430F2544内部具有16 MHz DCO时钟源,为系统主时钟。该型号单片机还具有两个16位定时/计数器:定时器A和定时器B,具有捕获定时功能。电网电压频率的测量由定时器B的CCR1模块进行测量。时间间隔△T由定时/计数器A的CCR0模块进行设置。图3为系统结构图。
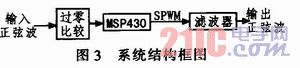
输入的正弦波信号模拟电网电压信号。由高速比较器LM311构成过零比较电路将正弦波信号整形成方波信号,然后传送给MSP430F2544进行捕获。若忽略LM51311的延时,则方波信号的上升沿即为正弦波的相位为零的时刻点。实际上,过零比较电路是一个相位捕获器。通过定时器记录相邻两个上升沿的时刻点,算出时间差,即可推出正弦波的频率。
后级滤波器采用单级L-C无源滤波器。滤波器的截止频率约为500Hz,而SPWM的载波频率约为33kHz,这样就能使输出正弦波失真度很小。
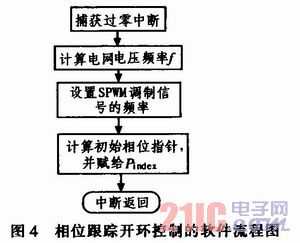
SPWM信号由单片机的两个定时器控制产生。定时器A的CCR0控制产生载波频率,而CCR1为调制值,即正弦波的离散值。定时器A设置为增计数模式,输出设为PWM复位/置位模式。当定时器的值等于CCR1时复位,等于CCR0时置位且定时器复位并从0开始计数。控制定时器B的CCR0产生正弦调制信号,每当CCR0等于定时器的值时单片机产生中断,根据相位指针Pindex将下一个正弦波的离散值写入定时器A的CCR1,这样输出正弦波的相位就增加一个△。只要改变定时器B的CCR0的值输出正弦波的频率就会发生改变。电网电压的过零脉冲信号由定时器B的CCR1进行捕获,由两级堆栈TB计算电网电压的频率f,并将相应的值写入定时器B的CCR0寄存器中。在每一个过零中断到来时,根据频率f与关系R:P=R(f)算出初始相位,并赋给相位指针Pindex,这样输出正弦波的相位就等于电网电压的相位。图4为相位跟踪开环控制的软件流程图。
程序设定定时器A的CCR0为256,系统时钟为16 MHz。因此,逆变器输出电压周期最小调整量为62.5 nsx256=16 μs。电网电压频率为50 Hz,即周期为20 ms,则最小调节相位为16μs/20msx360°=0.288°。即相位的调节分辨率为0.288°/360°x100%=0.08%。因为计算频率需要两个信号周期,而设置指针及频率需要一个周期。因此系统稳定只需3个电网电压周期。这样的速度是比较快的,而且不会产生振荡。
- 全数字锁相环的设计及分析(03-01)
- 基于新型数字锁相环的三相电压型PWM整流器(06-08)
- 一种新型带宽自适应全数字锁相环的设计方案(02-17)