一种新型带宽自适应全数字锁相环的设计方案
本方案采用理论分析与硬件电路设计相结合的方法进行了系统设计,并用FPGA予以实现。系统仿真与硬件电路测试结果证实了设计方案的正确性。该锁相环的自由振荡频率可随输入信号频率的变化而改变,具有电路结构简单、锁相范围广、锁定速度快和稳态误差小等特点。
0 引言
锁相环是一个输出信号能够跟踪输入信号相位的闭环自动控制系统,由于其独特的优良性能,在通信、雷达、测量和自动化控制等领域得到极为广泛的应用。
全数字锁相环(ADPLL)相对于模拟锁相环具有可靠性高、参数稳定、易于集成等特点,因而得到了越来越广泛的研究,成为各种电子设备中必不可少的组成部件。
锁相环具有三个重要的性能指标:锁相范围、锁相速度和稳定性。为提高锁相环的各项性能指标,一些学者进行了深入的分析和研究。
本文提出了一种基于自适应比例积分的复合控制方式,来克服锁相环所存在的锁相范围、锁相速度以及稳定性之间相互制约的问题。
1 全数字锁相环的结构和工作原理
系统由数字鉴相器、自适应控制器、数字滤波器和数控振荡器四个模块组成,如图1所示。下面对各个模块的工作原理进行详细的介绍。
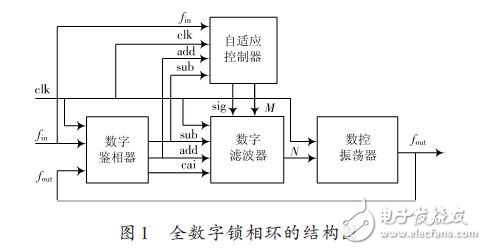
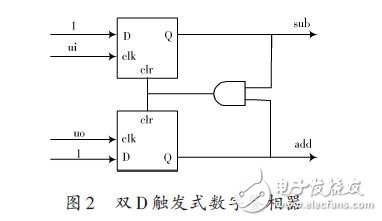
该ADPLL采用双D触发式数字鉴相器。鉴相器对输入信号和输出信号的相位进行比较,输出反应相位超前(或滞后)的信号sub(add),sub 和add 不仅反映了相位的超前滞后情况,其脉冲宽度也反映了相位误差的大小。其结构框图如图2所示。
自适应控制器模块主要起到调节环路带宽的作用。控制器一方面对输入信号进行鉴频,另一方面对鉴相误差信号sub、add进行量化,根据量化值计算出滤波器控制参数M,如果输入信号频率发生较大的变化,控制器发出控制信号sig,将控制参数M 赋给滤波器,对周期性复位可逆计数器和不复位可逆计数器进行初始置位,以此来迅速地实现频率捕捉和环路带宽的调整。
环路滤波器主要由周期性复位可逆计数器和不复位可逆计数器构成,其中系统高频时钟clk为其同步时钟信号,add和sub作为两个计数器的加、减计数使能控制信号。计数使能信号为高电平时,两计数器在clk时钟上升沿到来时进行相应的加1或减1操作,计数使能为低电平时则保持计数值不变。当输入信号fin 上升沿到来时,将两计数器的计数值进行移位相加,相加结果送入锁存器,作为数控振荡器的控制参数N,然后将比例计数器复位。
数控振荡器模块采用除N 计数器式数控振荡器,在系统高频时钟clk的控制下工作,分频参数N 来自环路滤波器的输出值,如果计数器计数值小于N,每一次clk 上升沿到来时,计数器加1,计数到N 时,计数器复位,输出fout 取反。
2 系统的建模与分析
由以上分析可知,当输入信号在锁频点附近变动时,锁相环的数学模型可以用图3来表示。
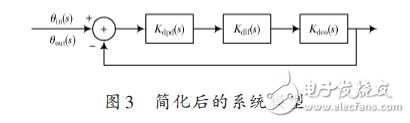
图3 中,θin (s) 为输入信号fin 的相位,θout (s) 为数字压控振荡器输出信号fout 的相位;Kdpd (s)、Kdlf (s)、Kdco (s) 分别为数字鉴相器环节、数字滤波器环节、数字压控振荡器环节的传递函数。
2.1 系统数学模型
设系统高频时钟信号为fclk,由双D 触发器型鉴相器的工作原理可以求出鉴相模块的传递函数为:
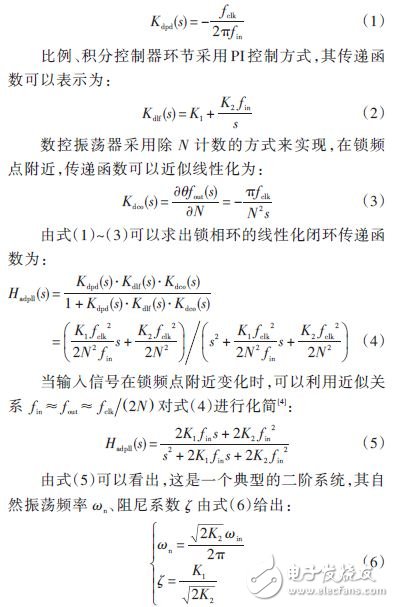
式中:K1、K2 是滤波器的控制参数,ωin 是输入参考信号的角频率。如果令K1、K2 均为固定的常数,那么式(6)满足文献[10]中提出的带宽自适用控制律,即满足下式:
式(10)表明,系统的调节时间和输入信号的周期成正比,这和带宽自适应控制律式(7)一致。根据式(10),(11)可以选择合适的C1, C2 以确保系统良好的动态性能,从式(12)可以看出提高系统高频时钟频率fclk,可以减小系统的稳态误差。
3 系统仿真和试验
本设计采用Verilog HDL硬件描述语言进行电路设计,以Altera公司的Quartus Ⅱ软件为设计平台,最后应用EP1C6Q240C8 FPGA 器件实现硬件电路,其中芯片的系统时钟频率为20 MHz.选取控制参数C1 = 0.113,C2 = 0.707,此时环路滤波器控制参数K1 = 2-1,K2 = 2-2,系统的响应时间ts 约为6 个输入信号周期;超调量Mp%为4.32%;频率跟踪锁定范围设计为76.3 Hz~78.1 kHz.
3.1 仿真波形及分析
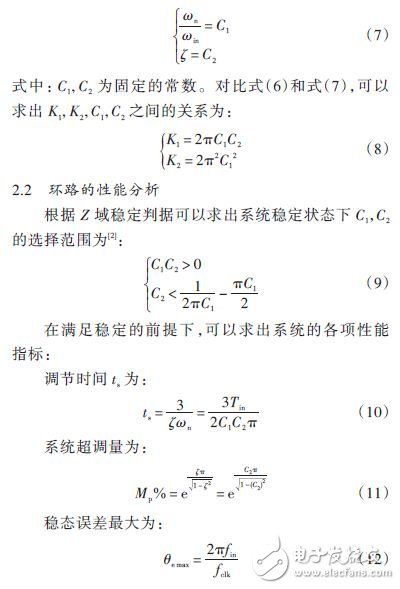
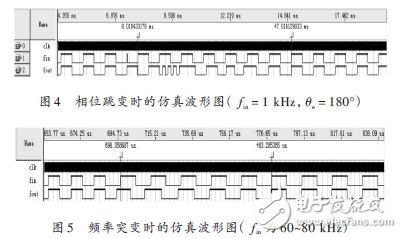
本文所设计锁相环的仿真波形图如图4,图5所示。
从仿真波形图4可以看出,锁相环在输入信号相位发生180°跳变时,可以在7个周期左右实现相位的重新锁定。从图5可以看出当输入信号频率发生突变时,系统也可以迅速地实现重新锁定。
3.2 硬件实测波形及分析
硬件实测波形图如图6所示。
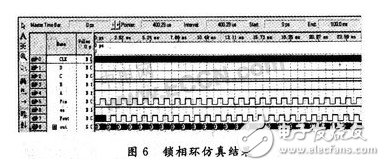
从实测波形图可以看出,系统具
- 全数字锁相环的设计及分析(03-01)
- 基于新型数字锁相环的三相电压型PWM整流器(06-08)
- 基于数字移相器的逆变器系统相位跟踪控制(08-23)
- 基于Matlab的IIR数字滤波器设计方法比较及应用(07-15)
- 基于Visual DSP++的无限脉冲响应数字滤波器(IIR)设计(05-21)
- 关于IIR滤波器的设计心得(08-09)