基于微处理器和PWM的交流可调稳压电源
出驱动
单片机采用定周期调占空比的方式实现PWM调制。其输出有两种方式可供选择,一种输出方式的脉冲宽度受来自ADC0809的直流偏置+交流幅值的数据控制,脉宽高、低电平延时量按正弦脉动直流规律变化,这种方式的输出电路和程序编写都简单,但输出端需增加隔直流电容,适用于输出功率不大的应用场合,如图8单片机PWM脉宽驱动电路所示;另一种是以ADC0809输出的最高数字位作为正负符号位(所加的直流偏置幅值),对负数求补后再决定输出脉冲宽度,这相当于用软件整流,输出的脉宽按全波整流波形的规律变化,为使输出电压按正弦交流变化,输出电路需增加极性变换电路,不需要隔直流电容,单片机需增加变极性控制端子,这种方式适用于输出功率较大且不适用隔直流电容的应用场合。
请参看图9单电源变极性交流输出仿真电路。
3 单片机PWM的交流稳压原理
电源在实际使用中往往由于电网电压或负载电流的变化导致电压波动,严重影响电桥测量的精确度。要实现稳压,必然要引入闭环的负反馈控制。对交变的正弦信号,如何确定给定值和反馈值是实现交流稳压的关键。
3.1 交流给定值的确定
交流给定值的确定有很多方法,如采用数表法确定每一采样时刻的给定值,此方法需要的存储空间很大,而且要求精度越高,所需存储空间越大,不太适合存储空间有限的单片机。一种简单有效的方法是采用默认值加键入增减值作为给定值,这是一个数字量,对应着正常交流输入情况下的交流输出有效值。
3.2 反馈值的检测与量化
对实际输出的交流电压作全波整流和平均值检测,然后量化为数字量,可采用的方法也很多,如模数转换型或压频变换计数型均可。此数字量对应着实际输出的交流有效值。在调试过程中,调试程序中的相关参数,或调试电路参数,使正常情况下输出的电压有效值达到给定值时,反馈的数字量等于给定值数字量。
3.3 偏差信号的PID调节
不论是电网电压变化,或是负载电流的变化,都反映在稳压电源输出电压的变化上,应用单片机对反馈值与给定值的差值作数字PID调节,输出的数字量用以调节输入端的数控增益放大器,只要满足闭环反馈控制为负反馈性质,就可实现无静差的稳压控制,使交流输出电压有效值稳定在给定值上。
如果只要求输出电压稳定,允许有静差存在,可以只采用P比例度控制,这样可使控制算法大为简化。有关P、PI、PD、PID控制性能对比如图10PID阶跃响应曲线所示。
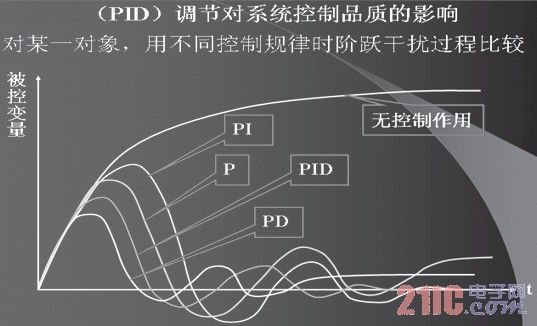
图10 PID阶跃响应曲线
由图示阶跃响应曲线可知,P和PD控制算法都存在静差。
如果将电网电压的变化作前馈检测,与微处理器的闭环负反馈控制结合构成前馈-反馈控制,则会在电网电压波动时提高控制的响应速度,使电网电压的波动不影响稳压输出,取得更好的稳压效果。
3.4 PID控制算法的特点
PID是经典的工业过程控制算法,通常应用于工作速度不很高的控制过程中。根据不同的控制对象和控制要求,可分别采用比例控制P,比例-积分控制PI,比例-微分控制PD和比例-积分-微分控制PID。其中比例控制的主要作用是对偏差的放大量,以提高控制灵敏度,但输出量是以偏差的存在为依存的,通常输出存在静差;积分控制的主要作用就是消除静差,但会使响应速度减小;微分控制则可提高响应速度,也存在静差。有阶跃响应曲线图10还可以看出,采用PID调节是响应速度最快的无静差控制。
4 单片机PWM调制交流稳压电路计算机仿真
4.1控制电路计算机仿真的特点
目前流行的电子仿真软件有好几款,其中PROTEUS嵌入式系统仿真与开发平台是一款可以实现数字电路、模拟电路、微控制器系统仿真以及PCB设计等功能的EDA软件。
从元件的选取到连线,直至电路的调试、分析和软件的编译,都在计算机中完成,所有的工作先在虚拟环境下进行。可以在原理图设计阶段对所设计的电路进行评估、验证,看是否达到设计要求和技术指标,并可以通过改变元件参数使整个电路性能达到最优化。这就避免了传统电子电路设计中方案更换带来的多次重复购买元器件及制板,在节省设计时间与经费的同时,提高了设计效率和质量。
现代化教学越来越多地使用多媒体教学设备和实验室电脑教学,这为开展一定量的计算机仿真实验教学提供了基础。仿真实验中不需要担心元器件的损坏,也不需要设立太多的条条框框,学生可以放心大胆地从多方位对仿真电路进行实验,作更深层次的分析探讨。
PROTEUS软件提供了三十多个元器件库,有数千种元器件,涉及电阻、电容、电感、二极管、晶体管、MOS管、变压器、继电器、各种放大器、各种激励源、300多种微处理器、各种门电路和各种终端等。提供的
- 50%以上占空比降压转换器下坡 (Downslope) 补偿(07-07)
- 数字电源UCD92xx输出电压波形的优化(06-18)
- 概述串联式开关电源的工作原理(09-15)
- 同步降压MOSFET电阻比的正确选择(06-20)
- 基于80C196的脉冲信号采集卡的设计(10-17)
- 开关电源PCB设计及其参数设置技术(02-01)