一种驱动LED阵列照明的恒压恒流模型及其仿真
引言
由于LED具备环保、长寿命和很高的发光效率等优点,使它作为下一代理想光源的地位已被各国相继确认。但LED最终取代传统光源,还有许多技术瓶颈,其中LED驱动技术是有待突破的关键瓶颈之一。
目前常用单颗大功率LED芯片的功率为1 W左右,要构建成更大功率的LED灯具,必须多颗LED芯片进行组合。LED发光的光通量与正向电流近似成线性关系,其光通量和色温都被流经它的电流所控制。确保每个LED发光芯片有相同的亮度的一个有效的方法是采用多个LED连成一串。然而,这样的一个主要问题是它们累积的电压降限制了串联的数量,限制了灯具功率扩大。另一方面,由于,LED的V/I特性的指数关系和LED正向压降的负温度特性,多个LED并联将遇到各LED串的均流问题。
影响光通量和色温的另外一个因素是温度。在使用中,LED灯一旦被点亮,系统温度会升高,随之LED的正向电流会增大,电流的增大会使温度更高。如果继续这个循环,LED灯具最终会被烧毁。因此,LED灯串的电流控制和温度控制在LED照明系统中显得非常重要。
1 LED封装芯片的正向电压差异
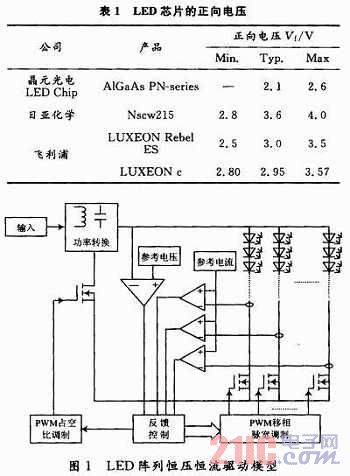
由于LED封装技术的复杂性,使LED芯片的最佳工作正向电压(Vf)存在较大的差异。表1列举了三家不同厂商产品的Vf值范围,从表中可以看出,LED芯片的Vf值最大偏差可以达到40%,平均偏差也在20%左右。LED的正向电流与正向电压成指数正变化关系,Vf的微小差异将造成LED正向电流的很大差异,从而影响LED正常照明。表中数据显示如此大的误差,故在照明驱动中不得不认真考虑这个问题。与驱动技术的发展相比,LED芯片制造和封装上的改进往往更艰难。因此控制流经LED芯片的电流显得更有意义。
2 大功率LED阵列灯具的驱动模型
有几种方法驱动多个LED串并联阵列,一个直接的方法直接用总线供电模式对多串LED芯片供电,参考文献,这样的模式没有解决LED串电流的均等问题,对LED灯具的寿命和发光效果造成不利影响。图1显示的模型在调控总线电压的基础上,在每个LED串上连接一个电流调节器。通常,电流调节器可以是线性模式或开关模式。图1采用开关模式,LED串总线电压由前极开关变换模块提供,每个LED串连接一个开关管,使LED串的电流受相移脉宽调制(Phase Shift Pulse Width Modulation,PS-PWM),其作用是:通过相位控制,确保各串电流脉冲无多串同时跃变;通过反馈控制,调整开关脉冲占空比,确保各串LED电流均等。一种PS-PWM调制电路的实现可参照。在图1所示模型中,采用数字控制芯片实现PS-PWM将更好。
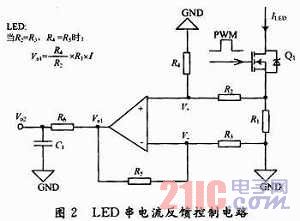
对LED串电流的取样可用图2所示的电路实现。取样输出值与串电流的比例关系如图中等式所示。
3 大功率LED阵列恒压恒流驱动模型的数字实现
数字控制芯片的工作性能在快速提高的同时,其成本也下降迅速。如Mieroehip公司的dsPIC33FJXXGSDSC系列芯片,TI公司TMS320F280xx系列芯片,其工作频率都在几十MHz,对100KHz级的开关频率,可以实现在单开关周期内完成一次控制循环。在成本上,如TI公司的TMS320F2 802-7DAT官网报价(2010年9月)为2.85美元,它集成了一个7通道12位ADC、8路PWM输出模块、一个模拟比较器,还有各种常用的通信接口。一块芯片就可以实现驱动控制的大部分功能,在成本上有较大的优势。
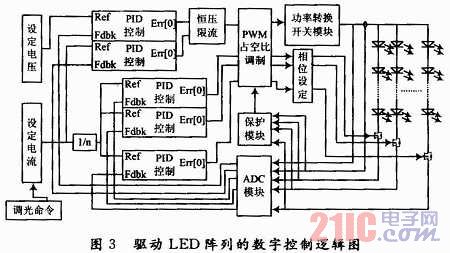
图3是对图1 LED阵列驱动结构的数字控制实现逻辑图。其相位设定模块、保护模块与ADC模块可以通过数字芯片的简单设置来完成;PID控制、恒压限流和PWM占空比调节模块通过软件编程实现。通过通信接口接收调光等命令,可以很方便的对LED照明进行亮度调节。由于控制结构是通过软件实现的,给LED驱动的工作状态检测和其他功能扩展带来了很大的灵活性。
4 数字控制逻辑的Matlab仿真
如图4所示,为数字控制逻辑的仿真模型图。其中:RL=105 Ω,RL1=100 Ω,RL2=95 Ω。
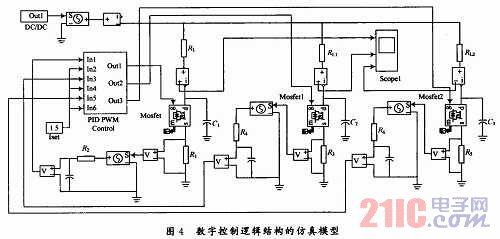
根据LED的V/I特性,当LED工作在Vf附近时,LED串可近似用纯电阻代替。不同的电阻值表征各LED串总Vf的不同。
4.1 PID控制和PWM相移
LED串电流的PID控制主要包括:
(1)对输出误差信号进行PID运算,确保系统的稳定性;
(2)对输出误差调整值进行归一化运算;
(3)归一化后的调整值与幅值为1的锯齿波比较,调节占空比输出PWM脉冲;
(4)控制输出脉冲相位。其中恒压限流PID控制完成DC—DC输出电压和电流的双环控制。
驱动相邻两串LED的PWM波形相差360°/N,N为LED串的并联总数。如图4为仿真模型中,N=3,则驱动第1到第3串的PWM波形初始相位分别为0°,120°,240°。
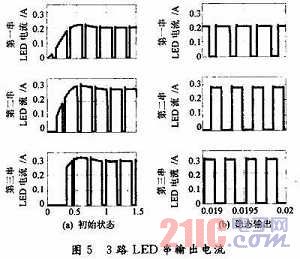
4.2 仿真结果
如图5所示,各串电流得到了较好控制,输出电流脉冲的占空比大小从第1串到第3串依次减小,但其峰值依次增大,确保各串均值电流一致。
DC—DC模块电压和LED串电流的PID调节输出如图6所示,其过冲分别为2.4%和2.1%,效果较好。
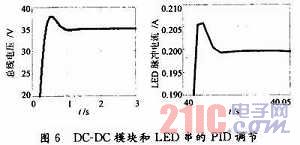
图7显示了无PS-PWM控制(虚线所示)和有PS-PWM控制的总线电流(实线所示)比较。从图7中可以看出,无PS-PWM控制的总线电流脉冲跳跃幅度是有PS-PWM控制的3倍。即N串LED并联时,通过PS-PWM调制可以使总线电流脉冲跳跃幅度减小到原来的1/N。

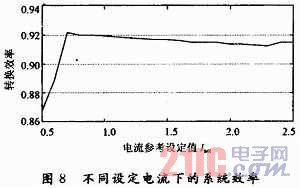
系统效率如图8所示,Iset为PID模块的输入比较值,通过修改它,等效于对LED串调光,在大部分调光范围内,其效率大于91%。