微机械陀螺的闭环驱动电路的设计与实现
时间:05-06
来源:电子产品世界
点击:
。
AGC反馈回路
AGC电路的基本原理是随着输入信号幅度的变化产生一个相应变化的直流电压(AGC电压),利用这一电压去控制某种可变增益放大器的放大倍数[4]。当输入信号幅度较大时,AGC电压控制可变增益放大器的放大倍数减小;当输入信号幅度较小时,AGC电压控制可变增益放大器的放大倍数增加。我们需要将驱动检测信号输入AGC反馈电路,产生相应的直流电压,将其与参考电压比较,来控制波形信号发生器[5]。电路如图5所示:
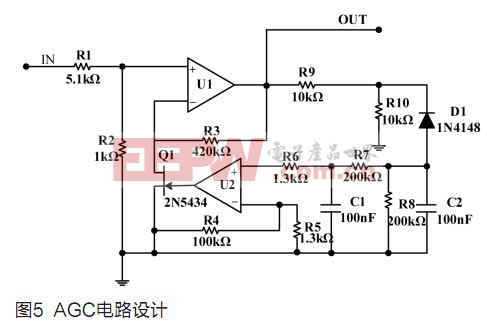
图5中,输入信号经电阻R1、R2分压后送往运放U1的同相输入端,二极管D1对运放U1的输出信号分压信号整流后,经过一个形滤波电路得到一个负向的AGC电压,该电压经运放U2放大后送往场效应管Q1的栅极。
当输入信号的幅值较大时,相应地得到了较大的AGC电压,运放U2输出较大的负压至场效应管Q1的栅极,增大了场效应管Q1的源漏极间的电阻,从而减小了运放U1的放大倍数。反之,当输入信号的幅值较小时,AGC电压也较小,运放U2输出也小,场效应管Q1的源漏极间的电阻很低,使运放U1得到较大的放大倍数,从而在U1的输出端得到幅值较大的信号。
试验发现,当输入信号由300mV逐渐增加到2.5V时,运放U1的输出信号都能基本稳定在1.5V。通过调整电阻R9和R10的阻值,就能在U1的输出端得到不同幅值的输出信号。
结束语
本文对微机械陀螺的闭环驱动电路进行了分析和设计,实现途径主要分为自激驱动方式和锁相环方式。设计的闭环驱动电路可保证陀螺始终工作在谐振频率,从而保证优异的系统性能。但是,闭环驱动需要检测陀螺振动情况,对电路要求较高,而且电路体积大,这需要在以后的工作中改进的地方。
- 单电源供电的IGBT驱动电路在铁路辅助电源系统中的应用(01-16)
- LED手电筒驱动电路原理(03-12)
- 基于HIP4081的厚膜H桥电机驱动电路设计(04-27)
- 基于MC34152的软开关变换器高速驱动电路设计(07-05)
- 光纤LED驱动电路的设计原理分析(08-06)
- LED照明设计需考虑的各种因素(10-01)