专家系统在雷达故障检测中的应用
时间:02-09
来源:今日电子/21ic
点击:
本网络结构采用双CAN总线,每个线路最多可连接110个智能节点,CAN总线传输速率设定为250kb/s,对应的位时间为4μs,网络上所有节点必须设置为相同值。节点数据链路层发送数据以CAN1总线为主,CAN2总线为辅。当CAN1总线拥堵的情况下,CAN2总线启动,如果发送控制器在5ms内仍未完成总线发送,则须取消未完成的发送,以免影响总线上其他智能节点的工作。接收数据通过CAN1总线、CAN2总线分别接收,并分别送给应用程序处理。
CAN总线智能节点的软件设计主要包括:CAN节点初始化、报文发送和报文接受。通过DLL提供API应用层接口编程。
实例应用
某雷达的天馈系统,由天线、天线座、馈线系统、倒伏机构等部件组成。专家系统发送自检命令给天馈系统,系统对自身的各个部件进行自检,自检结果通过CAN总线发回专家系统,其格式见表2。
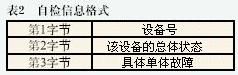
数据格式为3字节,其中,第1字节为设备号,是属于每个功能模块的唯一编号。第2字节是该设备的运行状态,其中,0x0F表示正常,0xFF表示故障,所有单体全部正常时上报正常状态,任意单体故障则上报故障状态。如果是故障状态,则第3字节的8个位,分别代表了各个单体的状态,0为故障,1为正常。
专家系统根据自检发回的信息,判断故障是否为最终故障,如不是则进行原理检测,最后给出检测结果。
对于不同设备的自检,有着不同的检测层次,天线座则可以检测到各单体,给出具体哪个单体故障,如果故障仍然不是很明确,需进一步检测,则可以转到原理检测,最后检测到不可分割或可以直接替换的单体。
- 新型雷达发射机控制台显示控制技术的研究(07-15)
- 雷达天线电源故障检测电路的设计(01-27)
- 基于Simulink技术的噪声调幅干扰仿真(03-08)
- 毫米波雷达前端系统设计(05-03)
- 基于PCI总线的雷达视频高速数据采集接口设计(10-16)
- 基于Matlab的雷达系统仿真软件包设计与实现(09-16)