MAX7456在可视倒车雷达中的应用
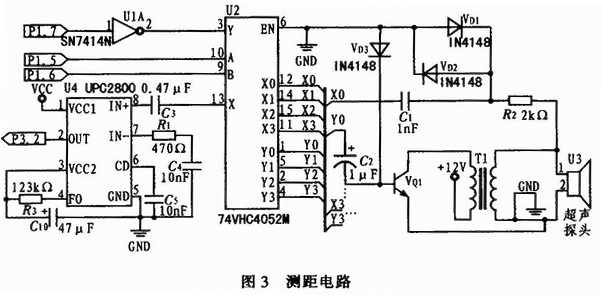
测距电路分发射和接收2部分,发射部分由SN7414、模拟电子开关HC4052的Y通道驱动4路超声波探头(图3中仅画出了其中一路)。超声波探头U3 采用车用全密封防水、防振型收发两用探头,该探头的工作电压为120 V左右。为使其能够正常工作,设计了由VQ1、T1、C2和VD3组成的驱动器。VQ1工作在开关状态,T1为变比1:10的升压变压器,用于将12 V的驱动电压升压到120 V,VD3为C2提供放电通路。为防止在发射超声波时的高电压通过接收回路C1回串,烧毁HC4052模拟电子开关,在接收回路的输入端接入由R2、 VD1和VD2组成的保护电路,将输入C4052的信号箝位在0.7 V。由于超声波探头接收到的正常回波信号通常只有几十毫伏,因此保护电路对回波信号无影响。
超声波测量采用循环工作方式,四路探头的选择由单片机通过P1.5、P1.6引脚控制HC4052来完成;测距时由单片机内部计数器控制,产生12个频率为40 kHz,占空比为50%的脉冲信号,由P1.7引脚发出,通过发射电路送到选定的超声波探头中。
接收回路由超声波探头U3、HC4052的X通道和UPC2800构成。UPC2800为红外接收器专用IC,内部集成有前置放大器、ABLC控制器、限幅放大器、带通滤波器、检波器和输出整形电路。其带通滤波器的中心频率可在30~80 kHz之间调整,正好覆盖40 kHz的超声波应用频率,因此本电路中用它完成对回波信号的放大、整形及检波。UPC2800的8引脚为信号输入脚。7引脚为前置放大器增益调整脚,其外接电阻可根据增益要求在0~1kΩ之间调整,串接的0.1μF电容用于隔直;3引脚为内部电源滤波电容接入脚,典型值为47μF;4引脚为内部带通滤波器中心频率调整脚,当外接电阻值为123 kΩ时,滤波器的中心频率为40kHz;6引脚为检波器滤波电容连接端子,其外接滤波电容典型值为O.1μF。检波完成后的脉冲信号由2引脚输出,送单片机的P3.2用作中断控制信号。
2.3 视频叠加及系统控制电路
视频叠加及控制电路如图4所示,车尾摄像头拍摄的视频信号经视频输入端子P1、MAX7456的VIN端子输入,为防止输入信号对 MAX7456内部电路的影响,必须在P1与VIN端口之间接O.1μF的输入耦合电容对输入信号进行直流隔离。输入的视频信号在MAX7456内部进行钳位,消噪声,字符点阵信号插入,电压衰减修正后由VOUT端子经P2输出,完成字符叠加工作。输出电路同样需要接输出耦合电容进行隔直,为不影响场同步信号通过,该电容通常应取330 μF以上,为降低耦合电容的成本和体积,MAX7456通过SAG端口连接电压衰减修正电容到VOUT输出端,用以在可接受的失真范围内尽量减小输出电容的容量,图4所示为其典型取值。
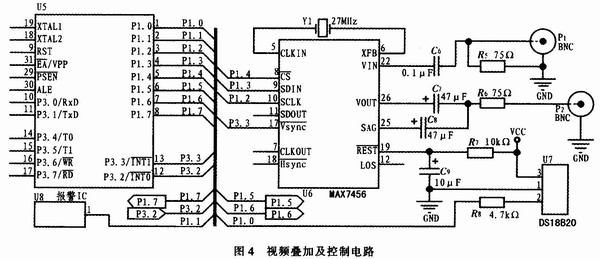
本设计中采用AT89C52对MAX7456进行控制,由于AT89C52没有SPI串行口,因此采用P1.2、P1.3、P1.4端口模拟SPI的时序对MAX7456进行控制。为防止在操作期间显示字符不稳定影响显示效果,此处采用MAX7456输出的场同步信号作为中断信号,控制AT89C52在视频信号的场消隐期间进行数据更新,以获得良好的显示效果。
AT89C52的另一个任务就是控制测距电路进行超声波测距。由于测距电路共有4个探头,因此采用循环测距的方法进行工作,本测距雷达设计测量距离最大为 5 m,根据超声波在空气中的传播速度式(3)可计算出倒车雷达在25℃时的声速为346.45 m,以此为基准进行计算,一次测距所需时间为28.8 ms,考虑到数据处理及显示控制时间,选择循环测距的切换时间为40 ms。测距时由AT89C52内部定时器进行控制,每隔40 ms由AT89C52的P1.5、P1.6控制HC4052切换一次探头,然后由P1.7发出12个频率为40 kHz、占空比为50%的脉冲信号通过发射电路到超声波探头,同时开启内部计时器进行时间测量。由于超声波探头在发射完探测信号后,还会有余振存在,在此期间检测不出有用信号。为防止此时的超声波余振信号通过接收电路回串引起AT89C52误中断,在该期间需关闭接收中断INT0。经实际测量,所使用的超声波探头在25℃时有1.7 ms的余振,因此关闭中断时间设置为2 ms,则由此产生的测量盲区在25℃时为0.35 m。由以上分析可得,在25℃时该超声雷达的测量范围在0.35~5 m之间。
3 软件设计
系统程序采用模块化设计,由主程序、后视系统控制、温度测量、距离测量、报警、温度及距离显示等模块组成,图5是主程序流程图。
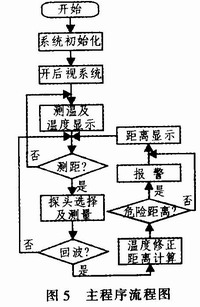
系统在接通电源后,首先对MAX7456及DS18B20初始化,然后开摄像头及监视器,作为行车过程中的视频后视镜。在此期间MCU控制DS18 B20对车外温度进行测量,并将测量值送
- 基于MAX7456视频字幕模块的单色OSD系统的实现过程(10-27)
- 基于CH371的实用USB接口设计(01-23)
- 基于单片机的晶闸管触发装置的设计方案(11-09)
- at89c52单片机引脚说明,AT89C52高性能8位单片机(04-18)
- 基于AT89C52的数控直流电流源设计(10-30)