基于LIN总线的纯电动车电池管理系统设计
(K)和常数矩阵W(K)、V(K),基于以上方程及相关矩阵,可以得到扩展Kalman 滤波估算算式。
扩展Kalman 滤波算法由滤波器计算和滤波器增益计算两部分组成:滤波器计算由式(6)~(8)完成,在k 时刻,由式(7)利用(k-1)时刻的滤波结果得到SOC 的预测值,再根据状态空间方程(6)得到在k 时刻的状态变量预测值V(K),并与实际测量值比较后得到预测误差, 然后根据式(8)对状态变量的预测值修正,得到新的滤波结果。滤波器增益计算由式(9)~(11)完成,式中Q和R 分别是噪声W (k)和V (k)的方差阵。
3 实验结果分析
本设计的底层ECU 的电路板如图7 所示,每个单体电池上都会固定一块底层ECU 的电路板。
在不同的充电策略下来检验电池管理系统的工作情况,通过检测电池组中各个单体电池的充放电电压、电流、温度、SOC 等参数,与实际值相比较来说明系统的检测精度,如图8所示,其中数据每分钟记录一次,横坐标为时间min.
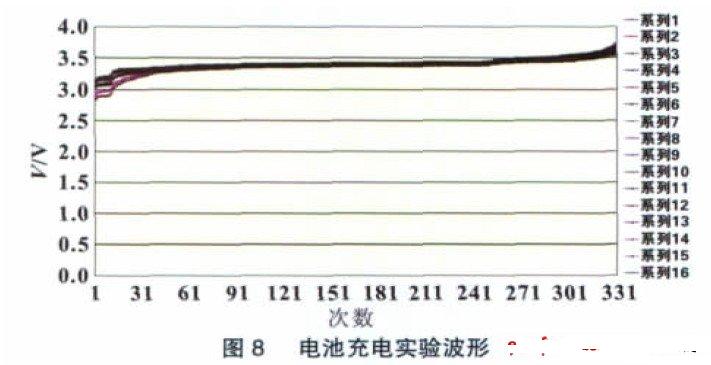
本设计设定充放电时电压上限为3.65 V,电压下限为2.95 V.温度报警为上限80 ℃。实验对电池进行充电,最终充电电压均在3.53~3.62 V,充电过程最大偏差50 mV,其中电池电压误差小于1%要求;此外,温度测量误差满足1%要求,电流测量精度为1%,SOC 误差在8%以内。当对单体电池实施人为过电压时,系统能及时进行报警和显示。通过实验表明本电池管理系统能达到预期的电池参数检测的目标,且都能满足精度要求。
4 结论
本文设计开发了一种磷酸铁锂电池管理系统,基于分布式方法检测各个单体电池的参数,引入了LIN 总线技术,进一步降低了系统的成本。本系统实现了电池实时监测与保护、SOC 估算、LIN 总线通信等功能。该系统结构简单、测量精度较高、能有效地保护电池组,用LIN 总线代替常用的CAN 或RS232 通信,为设计新型电动汽车电池管理系统提供了重要依据。
- 基于ATA6628和ATA6630设计的LIN总线汽车电子收(04-14)
- 基于LIN总线的汽车分级制网络结构(04-12)
- 统一功率格式降低SoC的功耗(05-28)
- 第三方IP:SoC设计的一种不稳固基础(09-15)
- 赛普拉斯智能照明解决方案支持欧司朗 DRAGON LED 以精简照明设计流程(11-26)
- 基于改进的遗传算法软硬件划分方法研究(07-20)