互阻放大器的稳定工作及其评估
互阻放大器(TIA)通常用于将传感器(如:光电二极管)的输出电流转换成电压信号,因为,有些电路或仪器只能接受电压输入。将一个运算放大器的输出通过一个反馈电阻连接到反相输入,则可得到最简单的TIA.然而,即使如此简单的TIA电路也需要在噪声增益、失调电压、带宽和稳定性方面进行仔细权衡。显然,TIA的稳定性是确保工作正常、性能可靠的基础。本应用笔记介绍了评估稳定性的经验计算,并讨论了如何调整相位补偿反馈电容。
产生自激振荡的原因
图1至图3所示为基本的TIA电路,图1常用于双电源供电系统;图2是该电路在单电源供电系统中的应用,进行了少许修改,R1和R2组成的电阻分压器提供一个偏压,在没有光照(只有一个很小的暗电流流过光电二极管)的条件下确保运放的输出节点电压高于下限指标,使运算放大器输出级工作在线性区域。该偏置电压改善了光照较弱条件下的光信号检测和响应速度。但是,必须将IN+引脚的偏压保持在一个较小数值。否则,光电二极管的反向漏电流可能降低线性度和整个温度范围的失调漂移。有些应用中采用图3所示电路,光电二极管跨接在运算放大器的输入端。该电路可以避免光电二极管的反向偏压,只是需要一个额外的缓冲参考。缓冲器必须具有足够快的响应速度,以吸收必要的光电二极管电流,这意味着放大器A1必须具备与放大器A2相同的响应速度。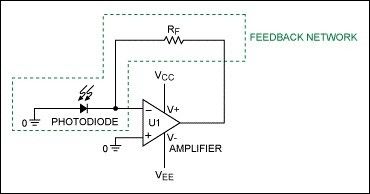
图1. 基本的TIA电路(双电源供电)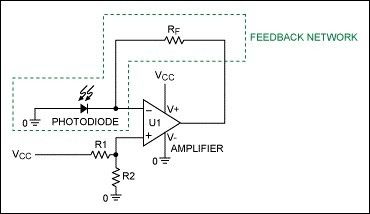
图2. 对图1所示TIA电路进行修改,用于单电源供电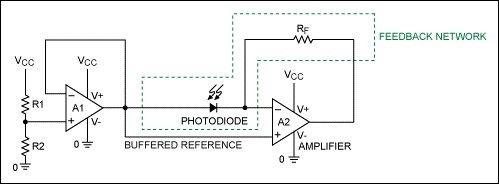
图3. 对图2电路进行修改,用于单电源供电
如同任何带反馈的运算放大器电路,上述电路也可以划分成开环放大器、AVOL、由电阻和二极管组成的反馈网络。图4所示为图1-图3中光电二极管的等效电路。?对于大多数光电二极管,RSERIES = 0,RSHUNT =近似无限大。因此,简化模型为理想电流源与结电容并联,我们将利用这种简化的光电二极管模型进行后续的稳定性分析。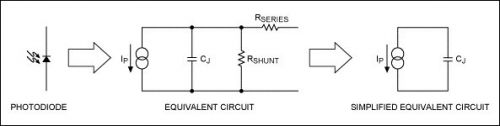
图4. 光电二极管等效电路:IP = 光电流;RSHUNT = 二极管结电阻;CJ =结电容;RS = 串联电阻。
为了理解图1-图3电路产生振荡的可能性,最好画出开环增益的频响曲线以及反馈系数。图5所示为运算放大器的开环增益响应,增益从直流到主极点频率保持稳定。此后,每十倍频程降低20dB,直到第二个极点。利用数学公式,单极点频响可以表示为:
其中:
AVOL =直流开环增益
AVOL(jω) =开环增益频响,ω
ωPD =主极点频率,弧度/秒
利用光电二极管的简化等效电路,反馈网络只是一个反馈电阻(RF)、总输入电容Ci (光电二极管结电容与运算放大器输入电容)共同构成的单极点RC滤波器。反馈系数为:
因此,反馈系数的倒数是:
图5为1/β(jω)频响曲线图,低频段曲线保持在稳定的单位增益,为单位增益电阻反馈。从角频率fF开始,频响曲线以20dB/dec上升。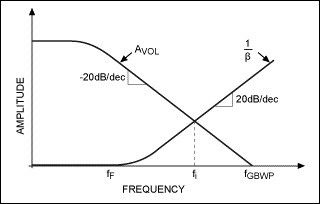
图5. 开环增益(AVOL(jω))、反馈系数的倒数(1/β(jω))随频率的变化。两条曲线闭合的速率决定了发生振荡/自激的可能性。
由Barkhausen稳定性定律可知,当闭环TIA电路没有足够的相位裕量,使得Aβ ≥ 1时,可能产生自激。因此,频响曲线AVOL(jω)与1/β(jω)曲线的交点即为发生自激的临界点。该交点频率的相位裕量由两条曲线((AVOL(jω)和1/β(jω))的接近速度确定。如果两条频响曲线靠近的速率是40dB,如图5所示,电路将出现不稳定。也可以通过另一种直观方式理解这一点,在较低频率时,反馈信号的相移就达到了180度,使负反馈极性反转,变成了正反馈。随着频率提高,进入AVOL的-20dB/dec衰减区时,运算放大器主极点增加了90度相移。同样,反馈网络则会引入额外的90度相移,从而在Aβ = 1处产生大约180度相移。如果相移达到180度,则会发生自激振荡。如果相移接近180度,则会产生明显的振铃。任何情况下,都可通过相位补偿电路使电路达到稳定。
反馈电容计算
通常是在反馈电阻上并联一个电容,提供必要的补偿,保证足够的相位裕量(图6)。选择最佳的补偿反馈电容非常关键。增加相位补偿电容后,用RF || CF替换式(2)中的ZF ,反馈系数变为:
比较式2和式4,可以看出:电容CF除了修改极点外,还在反馈系数中引入一个零点。零点用于补偿反馈网络引入的相移,如图7所示。如果反馈电容过大,过度补偿相移,闭合速率降至每十倍频程20dB (相位裕量为90度);过度的补偿同时也降低了TIA有效带宽,即使带宽不会影响低频光电二极管应用,但高频或低占空比脉冲应用中的光电二极管电路将会受到带宽制约。在这类应用中
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)
- 带全速USB接口的PICl8F4550应用设计(04-12)
- 毫欧姆电阻在汽车电子系统中的应用(05-11)
- 利用双电机控制技术简化高能效电器设计(07-20)
- 为多路、多信号的快速扫描测量构建适当的数据采集系统(09-20)