基于三相四线APF的模糊直接反馈控制
存在一个公共的对称正定矩阵H,和矩阵Gij=Mi-NiKj,选取Lyapunov函数V(x(t))=xδ(t)THxδ(t),当x(t)≠0时,有V(x(t))<0。根据Lyapunov稳定定理,闭环模糊系统(19)在平衡点是全局渐近稳定的。
3.2 三相四线APF的T-S模糊直接反馈控制器设计
为了求解模糊反馈控制器的状态反馈增益矩阵Ki及正定矩阵H,通过简单的变量代换,转换为求解等价的矩阵X=H-1及矩阵Yi=KiX的线性矩阵不等式形式,可通过MATLAB软件中的LMI工具箱求解。本系统中,三相四线APF的主电路参数为La=Lb=Lc=L=4 mH,C1=C2=4700μF,R1=R2= 5 kΩ,根据主电路模型,参考文献,选择x4(0)=800 V,得平衡点处da(0)=0.111 25,db(0)=dc(0)=0.694 375,x1(0)=-0.137 2 A,x2(0)=x3(0)=0.068 6 A。
故系统在平衡点处的状态空间模型如式(22)所示。

由式(15)和式(16)的模糊前件变量函数,可得到系数矩阵行列式Mi、Ni的数值解。根据系统的特性,选择α1=10,α2=80,利用LMI工具箱可得到公共正定矩阵H以及4个反馈增益矩阵K1,K2,K3和K4的数值解。
4 仿真及实验结果
由以上分析,在MATLAB中建立如图2所示的三相四线APF模糊直接反馈控制的仿真电路。其中三相非线性负载为三相全桥整流电路,滤波电感为0.5 mH,滤波电容为1 000μF,负载电阻为25 Ω,仿真结果如图3所示。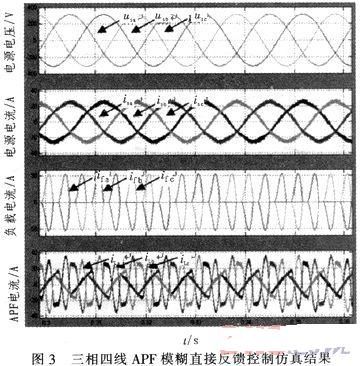
仿真表明了采用T-S模糊直接反馈控制的方法,可以实现三相四线APF的非线性控制,有效地补偿非线性负载所产生的谐波及无功功率。对于三相整流电路这种典型的非线性负载,该控制系统可以使电力系统电流的谐波含量由补偿前的98%降低至补偿后的6.8%,功率因数由0.87提高到0.99。
在突加和突卸三相全桥整流电容滤波负载的条件下,在PI控制下(kp=0.3,ki=40),直流侧电压在突加负载调节过程中超调量为1.9%;而在突卸负载时超调量为2.3%。采用本文的T-S模糊直接反馈控制时,在相同条件下,直流侧电压在突加负载调节过程中超调量约为1.2%,在突卸负载时超调量为0.06%。
在PI参数以及T-S模糊控制的参数没有改变的前提下,增大负载电流时,直流侧电压的超调量及调节时间如表1所示。 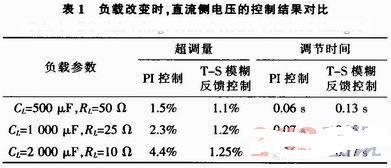
传统PI控制在负载参数发生变化时,可能达不到最优控制效果,甚至可能产生极大的振荡而使系统不稳定,需要重新进行PI控制参数设定。采用本文T-S模糊反馈控制的方法可以自动适应负载的大范围变化,其控制效果基本保持不变。
在此基础上,搭建了以TMS320F2812为核心的实验平台,其三相四线非线性负载为晶闸管调压不对称阻性负载(RL1=12 Ω,RL2=24 Ω,RL3=18 Ω),实验原理如图4所示,实验波形如图5~7所示。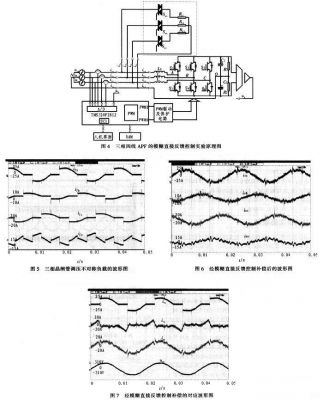
经T-S模糊直接反馈控制前后电源电流的频谱分布如图8所示。补偿前含有丰富的谐波,其总谐波含量THD为38%;补偿后总谐波含量THD约为9.9%。同时功率因数也由补偿前的约0.8提高到补偿后的0.97。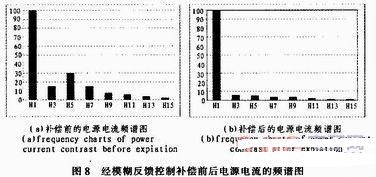
5 结束语
本文采用T-S模糊直接反馈控制的方法实现了三相四线APF补偿电流的非线性控制,对电源电流进行直接反馈跟踪控制,有效地补偿了由非线性负载引起的谐波及无功功率,同时校正了由于三相负载不对称引起零线上的非线性电流。在Lyapunov稳定理论的基础上,基于并行补偿算法的策略实现了T-S模糊反馈控制器设计,利用LMI的方法求解出满足全局渐近稳定的反馈增益矩阵。仿真及实验结果验证了T-S模糊直接反馈控制应用于三相四线APF,无需进行基于瞬时无功功率理论的坐标变换及复杂的计算就可以有效地解决其非线性控制问题,具有控制规则少,输出连续,容易实现,对负载的适用范围宽等优点。
- 混合有源电力滤波器的仿真研究(08-03)
- 高功率因数感应加热电源的设计与实现(01-04)
- 软开关APFC倍频感应加热电源的研究(07-28)
- 双向开关前置的单相升压APFC变换器建模和仿真(10-18)
- 高压直流开关电源的设计与实验研究(01-28)
- 一种无APFC的全压开关电源设计方案(08-29)