基于三相四线APF的模糊直接反馈控制
电力电子技术的快速应用使各种非线性负载对电力系统的影响日趋严重,三相四线制电力系统在工厂和城市供电系统中普遍存在,电力系统中的无功功率、谐波污染和中性线过流等已成为一个非常严重的问题而日益受到重视。为实现对电力系统中的非线性电流的有效补偿,有源电力滤波器(Active Power Filter,APF)是动态抑制电力系统中的非线性电流及补偿无功电流的有效途径。解决非线性电流控制是三相四线APF首要的问题,而三相四线制APF与三相APF相比,由于中性线的存在,使电力系统通常工作于非对称状态。基于瞬时无功功率理论的方法建立在三相d-q解耦方法生成参考补偿电流;基于电流等效原理的方法直接检测并控制电源电流,但难以解决APF的非线性控制问题;非线性解耦的方法基于微分几何理论,用状态反馈精确线性化解决三相APF的非线性控制,但难以有效地控制三相四线制APF;模糊自学习的方法对APF补偿参数进行辨识,模糊神经网络的方法对APF进行电流预测;T-S模糊控制理论也被应用于APF非线性控制中,文献基于T-S模糊方法实施三相APF的直流侧电压的非线性控制及单相APF的非线性控制
以上方法难以解决APF电流检测的实时性和补偿的快速性,由于算法的复杂而导致了非线性电流检测的实时性下降,并直接影响到补偿的效果。文中提出的三相四线APF的T-S模糊模型具有规则少、实现简单、运算量小的特点,通过直接反馈控制的方法实现了对非线性电流的检测与控制。在保证系统稳定性的前提下,采用并行分布补偿(PDC)的方法设计T-S模糊控制器,通过求解线性矩阵不等式,获得状态反馈增益,实现了非线性补偿电流的直接反馈控制。仿真及实验结果表明了该方法能够有效地实现非线性补偿电流的控制,控制输出连续,控制超调小,适应能力强,适合于三相四线APF控制。
1 三相四线APF的电路模型
三相四线APF的电路模型如图1所示。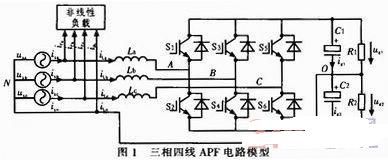
S1-S6分别为三相四线APF的主开关,三相电源电压为usa,usb,usc,电源电流为is=[isa,isb,isc,isn]T,非线性负载电流为if=[ifa,ifb,ifc,ifn]T,APF的输入电感为La,Lb,Lc,直流侧电容由两个容量相等的电容C1,C2构成,直流侧均压电阻由两个阻值相等的电阻R1,R2构成,直流侧的电压为ud1,ud2。
设APF补偿电流为iL=[iLa,iLb,iLc,iLn]T,由于电源侧中性点为N与直流便电容电压的中点O直接相连,取其为参考点,由图1可知。

设S1与S2的开关信号互补,S3与S4的开关信号互补,S5与S6的开关信号互补,即变流器以双极性方式工作,开关函数为Si,则

一般地,电流控制器可以采用滞环PWM电流控制,且滞环宽度足够小。令ud1=ud2=ud/2,ud为电容C1,C2上的总电压,S1,3,5的平均占空比分别为da,db,dc,且忽略R1,R2对系统的影响,则式(5)的平均占空比状态空间模型为:
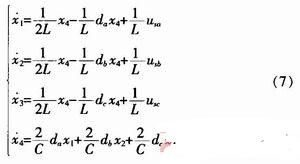
其中x1,x2,x3,x4为一个开关周期内的电感La,Lb,Lc上电流及直流侧等效电容C1,C2上总电压的状态变量
2 三相四线APF的模糊直接反馈控制
三相四线APF的模糊直接反馈控制模型(7)中,一般地,变流器的开关频率远远大于电源电压基波的频率,在一个开关周期内,usa,usb,usc可以近似认为是恒定不定的。令us=[usa usb usc]T,d=[da db dc]T。由式(6)及三相电源系统的特点,可知d与us相对应,且d是关于x,us的时变函数,即:
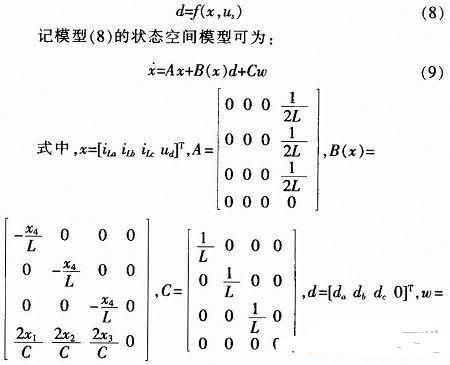
[usa usb usc 0]T。式(9)为参数不确定非线性系统,可以采用文献提出的参数不确定性线性化方法建立T-S模糊控制模型。将式(9)进行Taylor分解,得到平衡点线性化的T-S模糊控制模型。
设式(9)的真值模型为:

根据真值模型(10),构造一个控制器,使(x0,d0)是闭环系统的渐近稳定平衡点,实现对工作点的线性化。
根据电路的特点及控制的要求,同时为减少规则数,设T-S模糊控制器的输入前件变量为2个,由三相四线APF的电路模型可知,直流侧电压是可观测的,令模糊控制器的输入前件向量定义为:
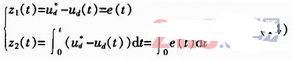
式中为APF直流电压侧设定值,ud(t)为APF直流侧电压测量值。模糊控制器的输入前件模糊化为正、负两值,设其隶属度函数如下:
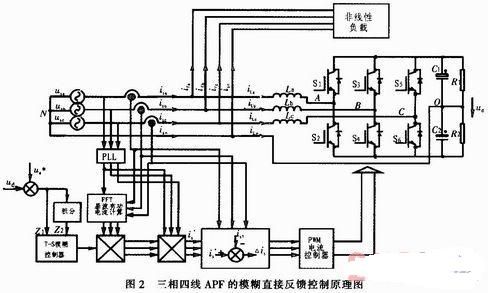
经由以上的分析,将模糊控制器构造闭环反馈控制,可以对三相四线APF的进行有效地控制,校正了由负载非线性电流,实现了对非线性电流的补偿,实现的原理如图2所示。
3 模糊反馈控制器设计
3.1 三相四线APF的T-S模糊直接反馈控制稳定性
对于以上所建立三相四线APF的T-S模糊控制模型(17),利用平行分布补偿算法设计模糊状态反馈控制律(18),得到闭环反馈控制系统(19),需要保证系统是稳定的。对开环模糊模型(17)在状态反馈控制律(18)条件下的闭环模糊系统(19),
- 混合有源电力滤波器的仿真研究(08-03)
- 高功率因数感应加热电源的设计与实现(01-04)
- 软开关APFC倍频感应加热电源的研究(07-28)
- 双向开关前置的单相升压APFC变换器建模和仿真(10-18)
- 高压直流开关电源的设计与实验研究(01-28)
- 一种无APFC的全压开关电源设计方案(08-29)