数字控制在电源应用中的特点
管理领域中,与模拟电源相比,数字电源提供了前所未有的优势。在一个典型模拟电源中,通常使用图5 中所述的后台单片机来完成其电源管理。
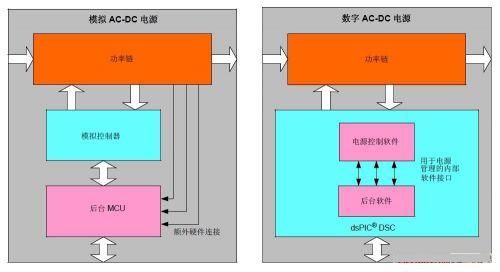
图 5: 不同电源类型在电源管理方面的差异
这个后台单片机将本地系统参数发送到主控制器或者数据记录器中。但这个单片机如何获取数据呢?必须用检测电路收集所需数据,并将其进行发送。在某些情况下,远程系统也可能对本地电源转换器发出指令。这个配置要求增加后台单片机和功率转换电路之间的硬件接口,从而增加了系统的成本。
相反地,数字电源不需要额外电路,因为所有系统参数已经由DSC 测量出来。这些参数存储在DSC 的存储器中,并且通过片上通信外设发送到远程系统,例如SPI、I2C?、UART或者CAN.任何对该系统操作的修改都无需额外的外部硬件而可由简单的软件来完成。
数字电源消除了冗余电路从而减少了系统总成本。例如,对于一个两级AC-DC 电源,第一级将对其闭环控制运行的输出电压进行测量。由于这一输出电压也是第二级的输入,因此该数据也被第二级用作前馈控制或者输入过压/ 欠压保护。
单独一个DSC消除了相同参数的重复测量,并可从内部提供不同控制或保护特性的所有选项。DSC也有助于系统对故障状态作出比分立模拟控制器更快速、更高效的反应。例如,在一个两级AC-DC 模拟电源中,如果故障出现在下级转换器中,除非这个故障状况已经被传送给PFC 控制器,否则前端PFC 升压转换器将无法识别这个故障。而数字控制器能检测到整个系统的故障状态,无论故障发生在何处,几乎都能在瞬间作出反应。
软启动以及模拟和数字电源的时序
当电源刚启动时,各种存储元件,如电容和电感,都处于零储能状态。在这样的状况下,电源突然升压会引起系统很大的浪涌电压和浪涌电流。因此,电源的所有阶段都必须使用软启动来确保系统元件避免受到不必要的压力。
许多(并非全部)模拟控制器都带有内置软启动功能。
模拟控制器在选择软启动持续时间时都只提供有限的灵活性,且需额外电路来实现启动延时。
在多级电源中,由于一些输出取决于其他输出,因此有必要通过预定义方式对输出顺序进行控制。这可由单独的时序芯片完成,或者使用后台单片机以及辅助电路来实现
由于所有时序控制和软启动子程序都可作为电源控制软件的一部分来完成,因此数字电源不需要外加硬件。电源的每一级都可实现一个软启动子程序,每个都具有不同的持续时间和延时。典型的软启动子程序如例1 中的C 代码片段所示。
void PFCSoftStartRoutine()
{
Delay_ms(STARTUP_DELAY)
pfcVoltagePID.controlReference = pfcInitialOutputVoltage;
while (pfcVoltagePID.controlReference <= PFCVOLTAGE_REFERENCE)
{
Delay_ms(SOFTSTART_INCREMENT_DELAY);
pfcVoltagePID.controlReference += PFC_SOFTSTART_INCREMENT;
}
pfcVoltagePID.controlReference = PFCVOLTAGE_REFERENCE;
}
在例1 中,dsPIC DSC 初始化之后就立刻调用软启动子程序。首先调用启动延时,随后输出电压参考将被设定为实际测量的输出电压。参考值一直以固定速率上升,直到其达到期望值为止。此时,软启动结束,系统正常运行开始。数字控制器可灵活使用软启动子程序。相同的子程序在不同时间阶段可通过不同参数进行调用。例如,如果系统要在故障发生后重启,启动延时和软启动持续时间可修改为不同的值。
时序控制可在不外加任何电路的情况下,通过一些灵活的配置加以实现。图6 中显示了一些时序机制原理图。
如果一个转换器取决于另一级的输出,则软件可设置标志来指示转换器何时完全启动,电压已经为下一级的上升作好准备。
如图6 所示,数字电源能根据实际应用需求以多种方式轻松实现时序控制。数字电源在选择软启动和时序控制方案上具有很大的灵活性,不需要增加专用芯片或者复杂的电路。
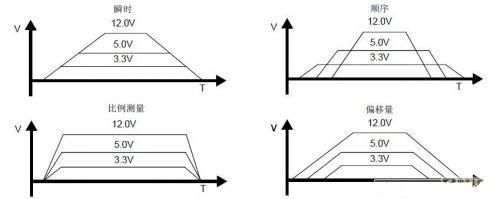
图 6: 时序控制机制
- 一种用于高速ADC的采样保持电路的设计(04-19)
- Microchip扩展针对数字电源应用的数字信号控制器产品线(02-23)
- 基于Visual DSP++的无限脉冲响应数字滤波器(IIR)设计(05-21)
- 一种基于数字控制的谐振变换器设计(06-20)
- 数字信号的三种纠错方法(07-21)
- 基于分类算法的双三相感应电机SVPWM(08-03)