一种基于数字控制的谐振变换器设计
LLC谐振变换器能以很小的工作频率变化,调节宽范围的输出功率,在全负载变化范围实现功率开关管的零电压开通和零电流关断。此处选取数字信号处理器(DSP)作为控制单元,设计了基于DSP的LLC谐振变换器,并通过分析给出了实现数字PI控制的具体算法和系统软件设计。最后给出了模块样机的实验波形,验证了理论分析的正确性。
1 引言
近年来,LLC谐振变换器由于其简单、高效、软开关等特点得到广泛关注和研究。与传统谐振变换器相比,LLC谐振变换器兼备了串联谐振变换器和并联谐振变换器的优点,其输出调节范围宽,开关损耗小,能在全负载范围内实现ZVS开通。文献主要讨论了LLC谐振变换器的拓扑结构、工作性能和基波建模分析。
对于LLC谐振变换器,变频控制是主要的控制方法。通过调节开关管的工作频率,改变变换器的增益特性,从而在宽输入电压范围内满足增益要求。目前,对LLC谐振变换器的研究多采用模拟控制,但其存在一些固有缺点,与模拟控制相比,数字控制可以简化硬件电路,消除因离散元件造成的不稳定和电磁干扰,具有设计周期短、控制精度和灵活性高等特点。
鉴于LLC谐振变换器优越的性能和目前模拟控制的局限性,此处将数字控制和软开关技术相结合,利用TMS28027系列芯片完成电源的控制策略,对LLC谐振变换器进行数字控制研究。最后通过实验验证了理论分析的正确性和有效性。
2 LLC谐振变换器
图1示出LLC谐振变换器结构。两个功率MOSFET VQ1和VQ2构成半桥结构,其驱动信号均为占空比为0.5的PWM波,构成了互补信号。该变换器的研究目标是在330 V~390 V宽输入范围的电压下,维持输出电压恒定为48 V,额定功率为150 W,并且满载运行时,工作效率在94%以上。
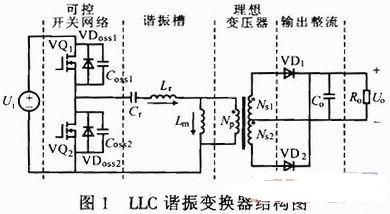
VDoss1,Coss1和VDoss2,Coss2分别为VQ1和VQ2的体二极管和寄生电容。整流二极管VD1和VD2组成一个中心抽头的全波整流电路,Co为滤波电容。LLC谐振变换器有两个谐振频率,一个是Lr和Cr参与谐振的频率,另一个是Lr,Cr和Lm参与谐振的频率。两个谐振频率分别为:
根据基波分析法,图1中开关网络的输出和次级整流部分可分别近似等效为一个正弦交流输入电压源和一个输出电阻,将一个非线性系统简化为一个线性电路。通过Mathcad拟合出变换器输入,输出的增益和归一化频率的关系曲线,如图2所示。

可见,在相同归一化频率点对应不同的负载点,即当保持变换器的输入、输出电压不变时,随着负载变化,变换器的增益曲线相应改变,负载越重,即Q值越大,变换器工作频率也越大。此设计通过改变开关管的工作频率,维持输出电压恒定。LLC谐振变换器的直流特性可以被分为ZVS区域和ZCS区域,一般变换器避免设计在ZCS区域。其中ZVS区域又可被分为两部分:区域1和区域2,当运行在区域2时,变换器类似于普通串联谐振变换器。因此设计时使变换器工作在谐振频率点fs偏左一点,以实现全负载范围的ZVS,并保证较高的效率。对于谐振变换器,一个完整的开关周期由一系列子区间和对应不同组合的运行模态。根据LLC谐振变换器开关管和二极管的导通和关断,每一个开关周期的工作过程被分为8个子区间,每个子区间对应一个等效电路。通过分析时域等效电路,得到每个开关周期的具体工作波形,图3示出LLC谐振变换器运行在区域1,即满足fm<f<fs工作频率范围时的工作波形。

[t0~t2]阶段,VQ1导通,谐振电流iLr开始以正弦形式增加,iLr大于励磁电流iLm。根据变压器极性,次级二极管VD1导通。变压器被输出电压箝位,故励磁电感Lm恒压充电,变换器传输能量到次级。t1时刻iLm过零点,方向由负变为正。
[t2~t3]阶段,在t2时刻,iLr=iLm,此后Lm参与谐振,LLC谐振槽开始工作,输出被变压器隔离,二极管自然关断。
[t3~t4]阶段,VQ1和VQ2关断,为死区时间。VQ1的结电容充电,VQ2的结电容放电,从而帮助VQ2实现ZVS开通。后4个工作阶段与前4个阶段类似,这里不再详述。
3 数字控制方案设计
基于数字控制的LLC谐振变换器的总体硬件结构如图4所示。LLC主电路是其核心部分,完成能量转换过程:DSP控制单元也是系统的重要部分,主要负责开关管PWM驱动信号生成,通过采样电压电流等信号完成对整个系统的控制和保护。

3.1 数字PWM的产生
此处设计选用TMS28027作为控制芯片,其内部具有ePWM模块,用于产生设计中开关管的驱动信号。定时器按照给定周期值循环计数,比较值存储在比较寄存器中,一直与计数器中的值进行比较。当比较结果相等时,PWM输出产生跳变。每个计数周期产生两次比较匹配,分别在前半周期的递增计数期间和后半周期的递减计数期间。由于ePWM模块具有映射寄存器,因此在计数周期的任一时刻都可以装载新值,改变PWM的周期和脉宽,从而实现变频控制。
3.2 PI控制的数字实现
PI控制是最早发展的控制策略之一,其概念清晰,算法容易实现,鲁棒性强,是工程控制中应用最广泛的控制器。这里采用PI算法,将其数字化实现,进行系统的闭环控制和调节。
PI控制系统的输出信号u(t)同时成比例地反映输入信号e(t)及其积分,即:
由于数字信号处理仅能根据采样时刻的偏差值来计算控制量,故为了实现数字控制,必须以采样周期T对上式进行离散化,对其进行z变换,得:
Gc(z)=U(z)/E(z)=Kp+Ki/(1-1/z) (4)
写成差分方程为:
u(n)=u(n-1)+Kp[e(n)-e(n-1)]+Kie(n) (5)
式中:u(n)为第n次采样的PI控制器输出;e(n)为第n次采样的误差信号,即LLC谐振变换器的电压输出值和电压给定值的偏差量;Ki为积分系数。
由于普通PI调节容易出现积分饱和现象,故此处设计中,采用改进式PI算法。其基本思想是遇限停止积分,当控制量达到饱和后,便不再进行增大积分项的积累,而仅积累削弱积分项。具体设计方法为,在计算u(n)前,先判断上一拍的PI输出量u(n-1)是否达到最大值,若u(n-1)>Ucmax,则仅积累负偏差;若u(n-1)<Ucmin,则仅积累正偏差。Ucmax和Ucmin分别为系统的最高工作频率和最低工作频率时的定时器设定值。
- 基于AT89S52的智能快速充电器控制系统的设计与实现(01-06)
- 不连续模式反激变换器的基本原理和电路设计(01-05)
- 2kW新型推挽正激直流变换器的研制(01-05)
- 负输出罗氏变换器实用性剖析(01-09)
- 一种新型ZCS-PWM Buck变换器研究(02-20)
- 高效紧凑反激式变换器电信电源的设计(02-13)