用LTB技术改善多相直流转换器的响应速度
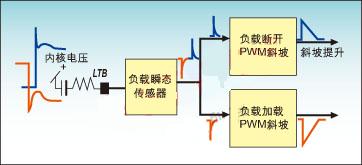
表:主要的延时参数值比较 图4:负载瞬态提升方案 图5:负载瞬态提升控制
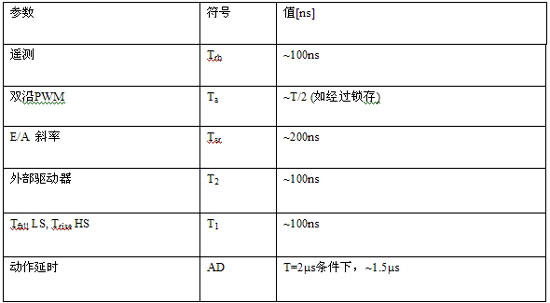
LTB技术可以解决这些问题并消除Tsr
负载瞬态提升(Load Transient Boost, LTB)使用的"负载瞬态传感器"是一种能在dv/dt超过内部门限时给出尖脉冲的电路。该电路的灵敏度可以通过改变与LTB引脚连接的外部网络进行设置。该传感器可以识别加载负载和断开负载两种瞬变情况。
如图4所示,当发生负载瞬变时(加载负载),"加载PWM斜坡电压"输出端的电压(红色)被设置为双沿PWM斜坡的下层基值,从该值开始形成斜率为m的斜坡;当负载断开时,"负载断开PWM斜坡电压"的输出端的电压(蓝色)被设为双沿PWM斜坡电压的上层基值,从该值开始形成斜率为m的斜坡电压。
如图5所示,每个负载加载断开PWM斜坡再与COMP进行比较,产生正确的PWM脉冲,其脉冲宽度代表了系统需要的正确能量值。而误差放大器将继续在"小信号"条件下工作。
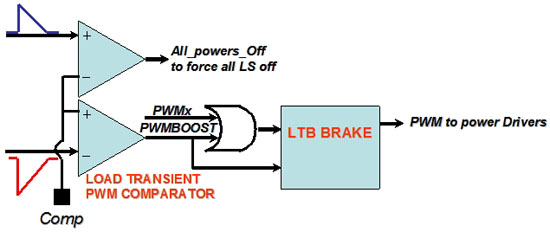
负载断开时,上述脉冲会切断所有功率MOSFET,特别是下边的功率MOSFET。这样可以极大地改善输出电压响应。加载负载时,名为"PWMBOOST"的脉冲将与每个PWM脉冲在每个相位进行"或"操作。"或"操作可以取消交织相移,并传送误差放大器要求的正确数量的能量。"LTB BRAKE"是一种数字滤波器,可以跳过最接近的交织PWM脉冲,直接到PWMBOOST。这款滤波器能够显著地提高输出电压响应。
与LTB技术相关的动作延时有几个ns:它直接以数字方式动作,对交织相移进行复位。这一延时主要是由传感器比较器引起的(约10ns)。因此LTB技术可以将Tsr从100ns减少到10ns,并且最重要的是它能使系统对没有保证的参数扩展不敏感。它还使得系统更"线性",因为LTB传送的能量是直接由误差放大器控制的。
当所有上边功率MOSFET导通从而增加电感电流时,整个电荷被用来在动作延时(AD)时间内保持输出电压。这意味着只有MLCC电容(通常为90%)才能提供输出电压,因为总的MLCC电容的等效串联阻抗(ESR)远小于总的大容量(bulk)电容(即15×10uF MLCC的总ESR为0.16mΩ,而4×560uF大容量电容的总ESR为1.5mΩ,比率为1:10,因此所需电荷的90%由MLCC电容提供)。
可以根据AD计算得出在负载瞬变ΔIo和时间长度To后至少需要多少MLCC电容才能保持输出电压在给定的电压下降ΔVout内。动作延时后电感电流增加TL,其中: 
在式中,L=电感值;N=相位数量;Vin=多相输入电压;Vo=输出电压。根据几何公式计算可以得到: 
该电荷的90%由MLCC维持,而10%由大容量电容提供,因此可以得到: 
因此,与动作延时直接相关的MLCC电容的数量就变得非常重要,因为它们直接与成本有关。
仿真与实验结果
仿真结果的依据是以下材料清单和规范:
1. 带Intel socket 775的BTX母板模型;
2. 带嵌入式驱动器和位于反馈路径外的遥测电路的N=3相交织控制器;
3. 开关频率为450kHz;
4. 在To=50ns内负载瞬变范围为15A到65A(ΔIo=50A);
5. 电感L=200nH、DCR为0.5mΩ;
6. 大容量电容Oscon 4×560uF,ESR为6mΩ;
7. MLCC电容15×10uF和3×22uF;
8. 系统输出阻抗(固定偏差)Rd=1mΩ;
9. 每相上边1×STD55NH30LL;
10. 每相下边1×STD95NH30LL;
11. 输入电压Vin=12V;
12. 输出电压Vo=1.4V;
13. 输出电压纹波<10mVp-p。
仿真结果很好地表明了交织相移如何被取消的。当交织相移为零时,输出电压由MLCC电容维持,最重要的是22uF的MLCC电容。为了去除任何回铃或过多的传送能量,LTB Brake机制可减少流进三个电感中任一个的电流。因此,输出电压具有真正的输出阻抗(盒状波形)。4~5us后轻微的下冲是控制环路恢复稳态状况所需的时间,它与系统的总GBWP和电流共享环路增益有关。在这个低频点,系统还对大容量电容的数量敏感。
如果采用公式1、2和3以及早前所述的电气规范,可以得出:ΔVout =Rd×ΔIo=1mΩ×50A=50mV;TL=314ns;ΔQ =12uC;CMLCC =216uF。该等效电容对应于15×10uF和3×22uF。
在负载断开时,LTB脉冲切断所有功率MOSFET。这一功能可以减少输出大容量电容的额外电荷,因为电感电流的斜率从Vo/L到(Vo+Vd)/L有了很大的提高,其中Vd是下边功率MOSFET的体-漏二极管电压降。该功能还能避免负电流流进电感,从而取消输出电压反向回铃。
实验测量结果是利用第一款实现LTB技术的商用产品获得的。该产品现在是ST公司的L6713A,L6713A首次采用了完整的机制来减少动作延时、反馈路径外的遥测、异步双沿调制器、LTB技术和嵌入式驱动器。该器件可以采用2个或3个交织相位,适合Intel的VR10.x、VR11和AMD的K8-F处理器使用。
实验结果与仿真结果的相同材料清单和相同规范有关。少量的回铃来自于建模不完善的母板寄生效应。基于上述原因,输出电压尖峰也要高于仿真结果。加载负载和断开负载时的响应时间(恢复稳态状况所需的时间)对仿真和实验测量来说是相同的。
作者:Osvaldo Zambetti
资深设计师
Alessandro Zafarana
设计经理
工业和功率转换分部
意法半导体公司