用电子组件提高电动型汽车的电池性能
凌力尔特公司
信号调理产品
设计经理
Mike Kultgen
混合动力电动型汽车电池中的电子组件是提高性能和安全性的关键。在集成电路设计领域的新技术使电池组设计师能进一步提高锂离子电池的性能。更高的测量准确度、更坚固的数据链路和电池容量的主动电荷平衡都帮助实现了更低的成本、更长的行驶周期和更快的充电。
典型的电池组方框图 (图 1) 由几组串联连接的锂离子电池组成,它们的测量和平衡由高压模拟集成电路完成。这些模拟前端 (AFE) IC 执行艰难的测量每节电池电压、电流和温度的任务,并向控制电路传递数据。控制器运用电池数据计算电池组的电荷状态和健康状态。控制器可能命令前端 IC 给某些电池充电或放电,以在电池组内保持平衡的电荷状态。
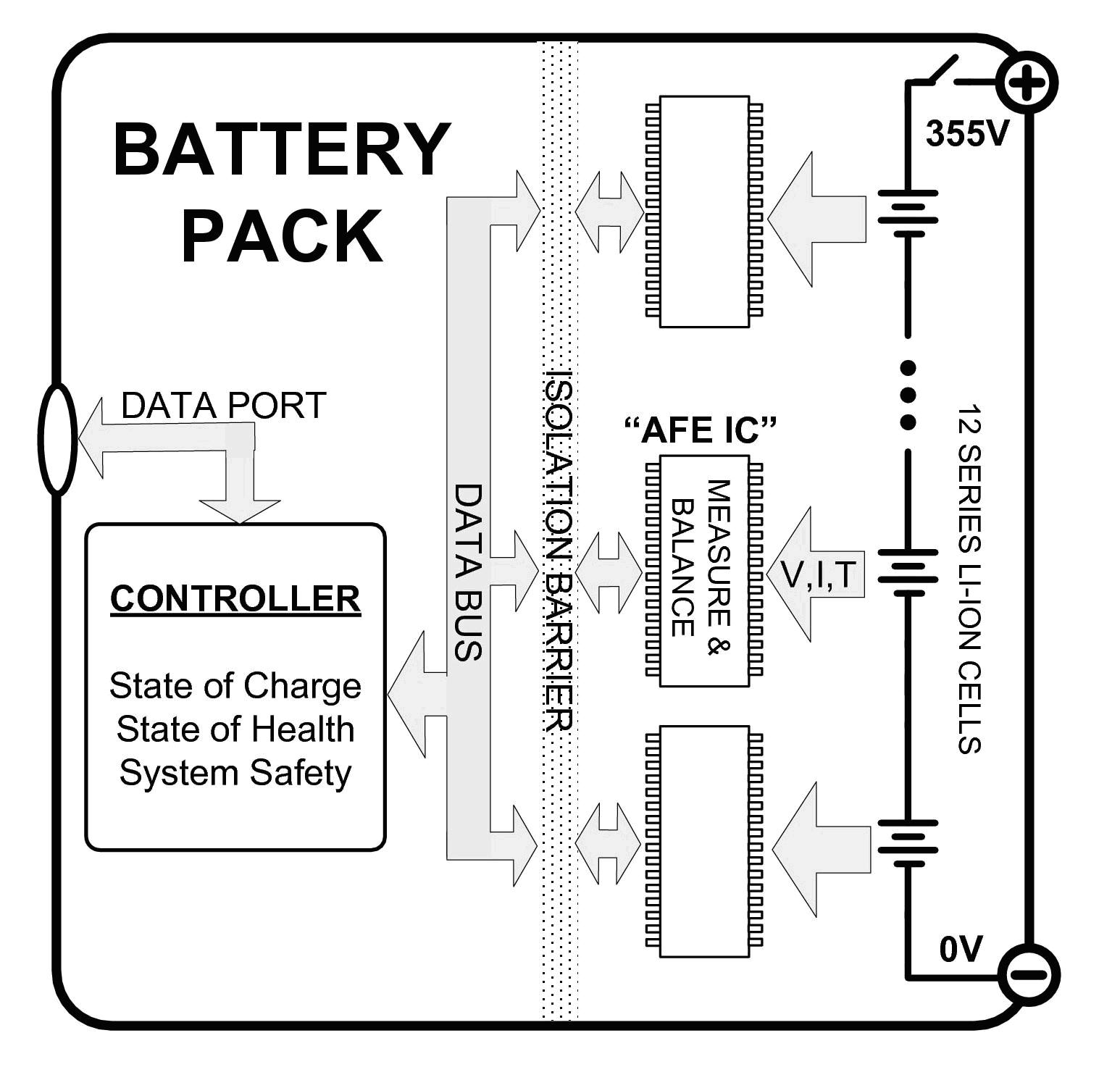
图 1:电池组方框图
BATTERY PACK:电池组
DATA PORT:数据端口
CONTROLLER:控制器
State of Charge:电荷状态
State of Health:健康状态
System Safety:系统安全
DATA BUS:数据总线
ISOLATION BARRIER:隔离势垒
AFE IC:模拟前端 (AFE) IC
MEASURE & BALANCE:测量与平衡
12 SERIES LI-ION CELLS:12 节串联的锂离子电池
更高的准确度意味着更低的成本
模拟前端 IC的测量准确度对系统成本有直接影响。需要准确的测量以实现有用的电荷状态 (SOC) 计算。为了实现长寿命,电池组一般在 20% 至 80% 的 SOC 之间工作。如果在 SOC 计算中有 5% 的不确定性,那么电池组的尺寸就必须增大 5%,这导致电池的成本显著增大。给一个 16kW-hr 电池组增加 5% 的容量,需要约 360 欧元 (460 美元)。改进 SOC 计算以实现 1% 的误差意味着,每个电池组能节省约 300 欧元 (385 美元)。
电池电压测量是 SOC 算法的关键要素。当测量 3.3V LiFePO4 (磷酸铁锂) 电池时,IC 电源和电池组开发人员都集中采用总测量误差 1mV 的规格。
对于诸如售价 480 欧元 (615 美元) 的 Fluke-289 手持式万用表等实验室设备,测量 3.3V 至 1mV 以内的电压是司空见惯的。AFE IC 必须以 1/100 的成本提供相同的性能,并在汽车环境中连续工作 15 个年。只有为数不多的 IC 技术能够实现这一目标。
真实世界中的准确度
什么样的 IC 技术最适合电池测量呢? 答案可从图 2 (典型 AFE IC 的方框图) 的误差分析获得。12 个串接电池之一由多路复用器 (MUX) 模块来选择。通过闭合"S"开关把电池电压存储在一个电容器上。断开"S"开关,然后闭合"T"开关。电池两端的电压将转移至 ADC。这种"飞跨电容器"方案消除了顶端电池 33V 的大共模电压,并保持了 3.3V 的差分电压。模数转换器 (ADC) 将电池电压与其电压基准进行比较,并产生一个与 VCELL 和 VREF 之比成比例的数字结果。
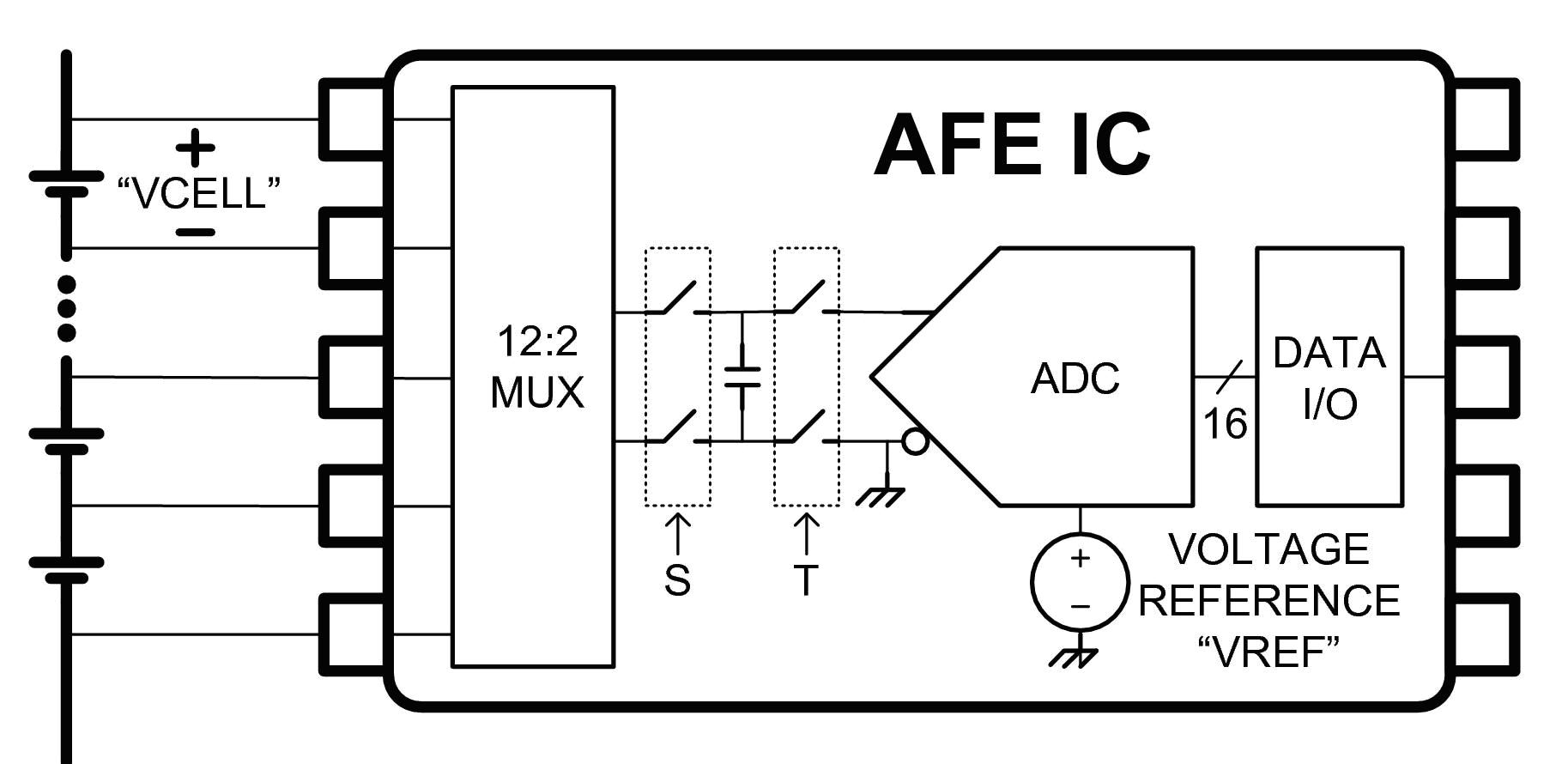
图 2:典型模拟前端 (AFE) IC
DATA I/O:数据 I/O
VOLTAGE REFERENCE:电压基准
如果开关的阻抗太大,无法在很短的采样时间内给电容器充电,那么 MUX 和飞跨电容器就可能引入测量误差。细致的开关电容器设计可消除这个误差项。
由 ADC 进行从模拟到数字的转换还可能由于组件失配而引入误差。其次,细致的设计与组件微调相结合,可降低 ADC 引起的误差。
AFE IC 的基本限制来自电压基准
假如电压基准下降了 1%,则所有的读数都将增加1%。电压基准是由某种物理量产生的,可以是反向偏置 PN 结的雪崩击穿 (一个齐纳基准)、两个基极-发射极电压之差 (一个带隙基准)、或一个电容器上存储的电荷 (一个 EPROM 基准)。每个 AFE IC 在生产中都进行了微调,以使电压基准的初始值非常准确。不幸的是,视 IC 技术的不同而不同,电压基准可能随着时间、温度、湿度和印刷电路板 (PCB) 组装应力的不同而产生极大的变化。这导致一些 IC 厂商只提出"典型"准确度,而关于 AFE IC 在真实世界中会怎样表现则未提供指导。
要在严酷的汽车环境中运行,最佳技术是齐纳基准。数年来,凌力尔特新的 LTC6804 AFE 电池组监视器 IC 运用齐纳电压基准技术,以保持优于所需的准确度。LTC6804 比前一代产品有了显著改进,前一代产品依靠带隙电压基准。例如,考虑 PCB 组装所产生的应力。AFE IC 在焊接过程中会遭受几种热冲击。在塑料封装和铜引线框架的膨胀和收缩过程中,芯片会经受机械应力。带隙基准的表现就像一个应变计,将机械应力转换成基准电压的变化。电压基准的任何变化都会直接降低电池测量的准确度。PCB 组件应力的影响示于图 3,在热冲击之前和之后对 10 个 AFE IC (3 种类型) 进行了测量。基准漂移以电池测量误差 (单位是 mV) 来表示 (假设采用的是一个 3.3V 电池)。
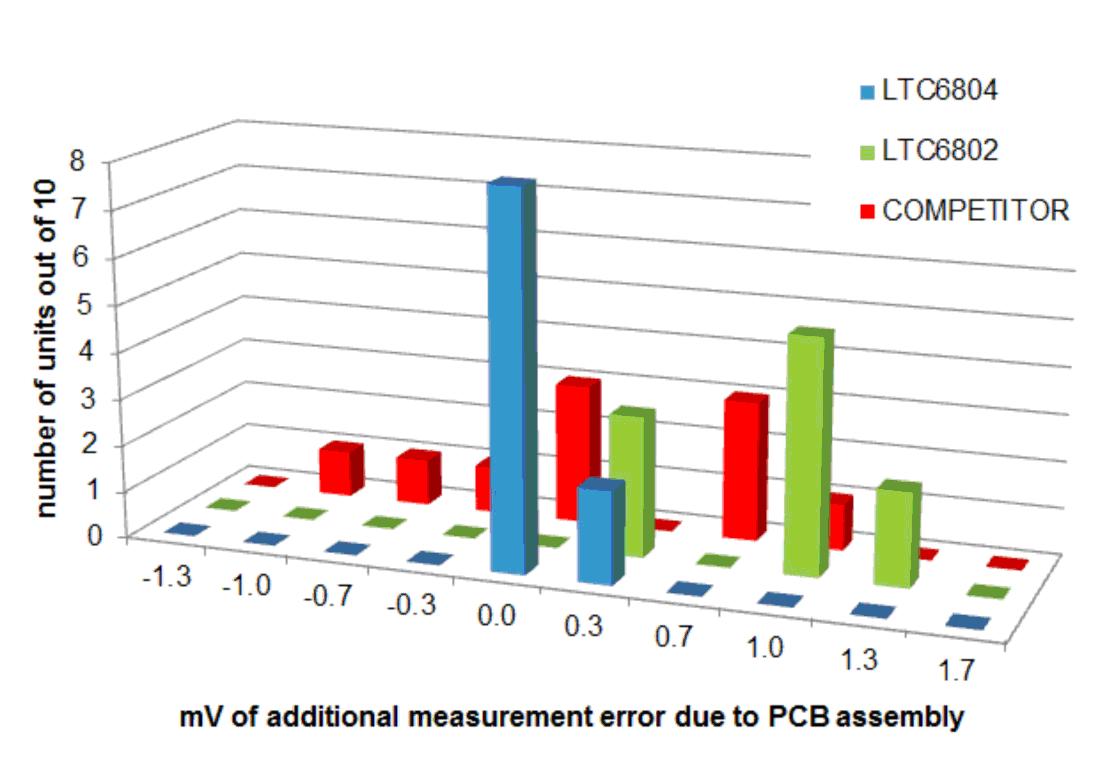
mV of additional measurement error due to PCB assembly
由于 PCB 组装而产生的额外测量误差 (单位 mV)
Number of units out of 10: 从10 个单元的数量
Competitor : 竞争对手的器件
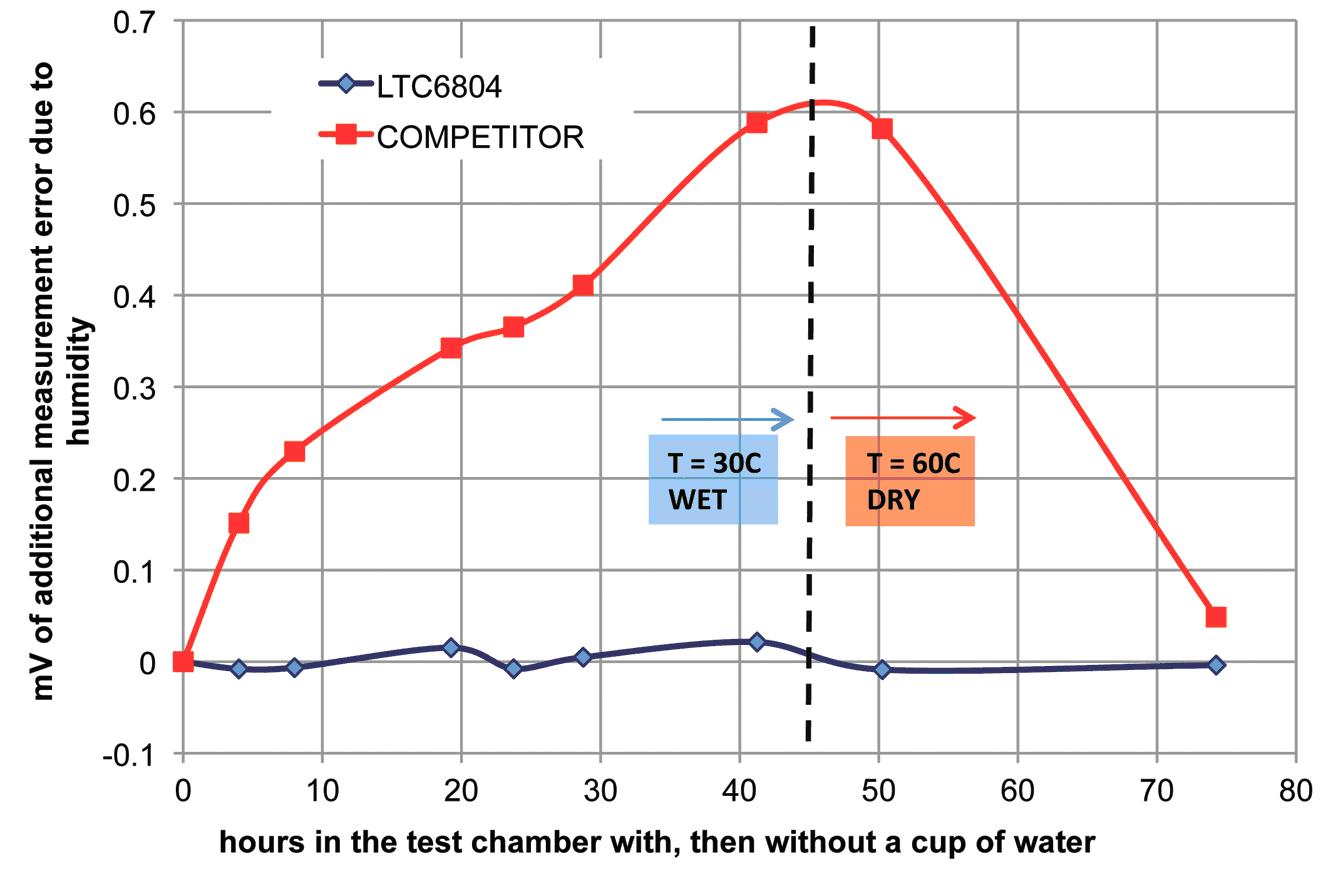
Hours in the tes chamber with, then without a cup of water
在有、然后是没有一杯水的测量室中的时间 (小时)
mV of additiaonl measurement error due to humidity
由于湿度而产生的额外测量误差 (单位 mV)
Competitor : 竞争对手的器件
Years of Operation : 工作年限
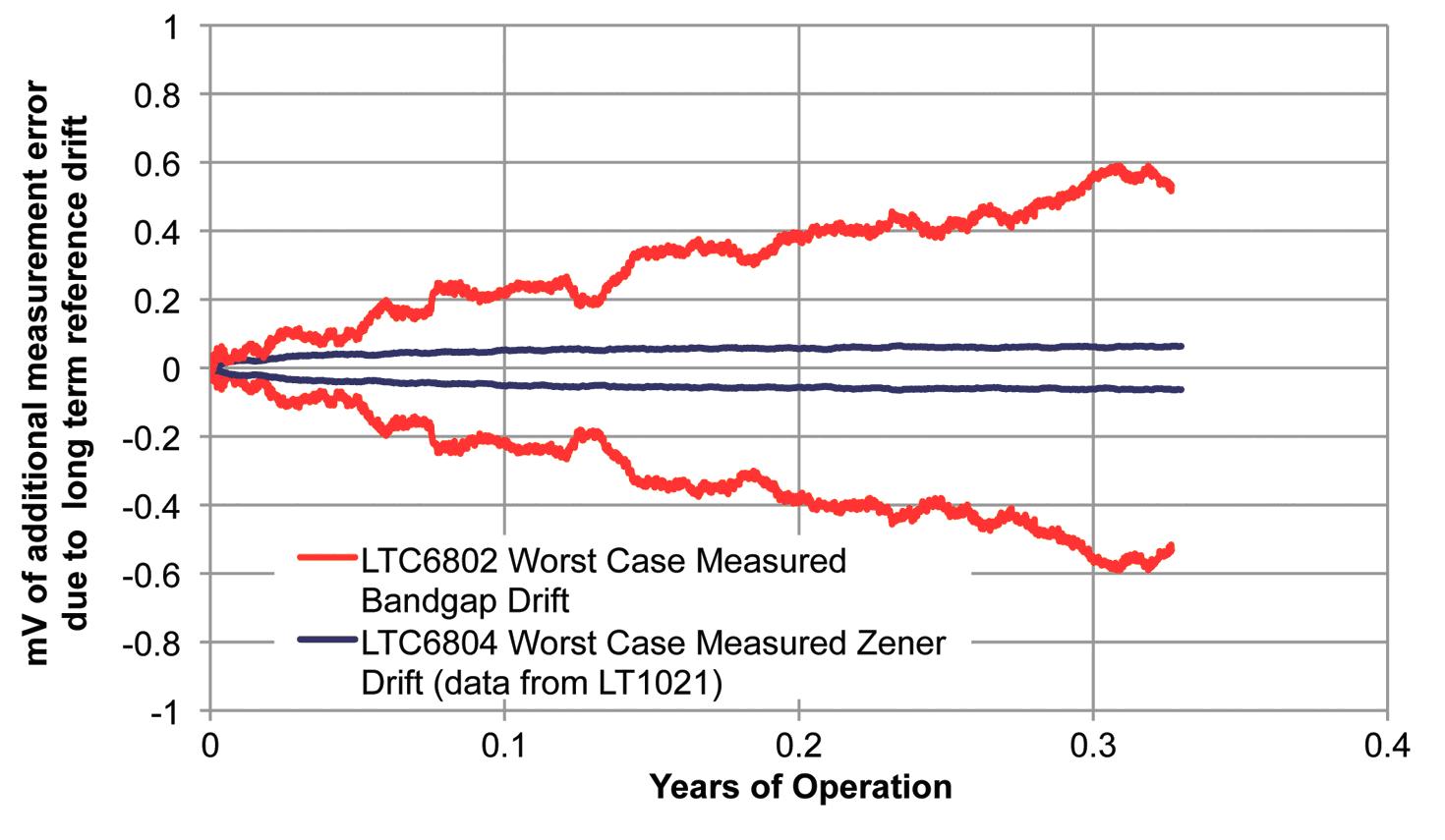
mV of additional measurement error due to long term reference drift
由于长期基准漂移而产生的额外测量误差 (单位 mV)
LTC6802 Worst Case Measured bandgap Drift
LTC6802 在最差情况下测得的带隙漂移
LTC6804 Worst Case Measured Zener Drift (data from LT1021)
LTC6804 在最差情况下测得的齐纳漂移 (数据来自 LT1021)

Years of Operation : 工作年限
mV of additional measurement error due to long term reference drift
由于长期基准漂移而产生的额外测量误差 (单位 mV)
Estimated mV Error = X * 3.3. / (SQRT
估计的 mV 误差 = X * 3.3/ [√ (小时/1000)] / 1000
(LTC6802 和其他基于带隙的 AFE IC)
LTC6804 LTC3300 LT8584 电动型汽车 电池 相关文章:
- 电动汽车行业减速刹车,电量耗尽之前还能走多远?(04-24)
- 专访:凌力尔特电池管理问答(07-15)
- 凌力尔特演示板汇总:多节电池的电池组监视器(中文)(07-12)
- 分享来自凌特大牛关于LTC6804相关问题解决方案(06-20)
- 随着电池组的老化,高效的双向主动平衡器可延长电池运行时间(08-07)