可编程和宽输入电压电池充电器的设计方案
随着锂离子化学电池在各种电子产品设计中的使用越来越普遍,为这些电池充电的创新解决方案变得越来越必不要少。为了获得最大程度的系统灵活度,我们可以使用微处理器来控制电池充电的各个方面,包括旨在提高充电速率和电池寿命的独特充电算法。这种方法还能够允许更高电压的电池组实施。
本文将介绍如何利用一颗微处理器来控制一个宽输入电压 DC/DC 控制器的功率级板。这种解决方案可支持高达 55V 的输入电压;5V 到 51V 范围的电池充电电压;以及在大多数情况下高达 10A 的输出电流。本文中所讨论的硬件和软件均由 TI 应用工作人员开发,并经过他们的测试,目的是让客户能够快速地进行解决方案原型机制造。
为了易于开发,我们将电池充电器分解为两个单独的板:微处理器控制器板和DC/DC-转换器功率级板(请参见图 1)。正负电池端均连接至功率级板,而系统管理总线 (SMBus) 通信线则连接至微处理器板。智能电池将我们想要的充电电压和电流信息发送给微处理器,之后将两个脉宽调制 (PWM) 信号发送给DC/DC-转换器功率级板,以设置实际输出电压和电流。
为了能够使用标准宽输入电压 DC/DC 转换器,功率级板设计有一个特殊的反馈电路(请参见图 2),以正确地控制电池充电。微处理器遵循的充电序列是,在电池电压接近其规定最大电压以前一直对充电电流进行限制。当达到最大电压时,充电电压便保持恒定,从而让充电电流逐渐减少,直到认为电池获得完全充电为止。这时,PWM 输出信号便关闭。
初始电流限制充电速率有两个电流电平。当电池过度放电时,在电池电压达到某个足够安全的级别来接受标准充电速率以前,将一直使用很低的充电速率来进行充电。
在如图 2 所示反馈电路中,U3:B 将 PWM-电流基准电压 (I_PWM1) 同提供给电池的测量电流 (ISNS1) 进行对比。如果 PWM 基准电压高于测量电流,则放大器输出为高。如果基准电压较低,则放大器输出为低。
一个电阻分压器(R30 和 R34)用于测量 U3:A 的 VBATT1 输入端的输出电压。我们将该电压同PWM-输出基准电压 (V_PWM1) 进行对比。如果该基准电压更高,则放大器输出为高。如果基准电压更低,则放大器输出为低。最大输出电压可由如下方程式表示:

图 1 宽输入电压智能电池充电器的高级系统结构图

图 2 正确对电池充电的恒流/电压-反馈电路

图 3 过压及反极保护电路

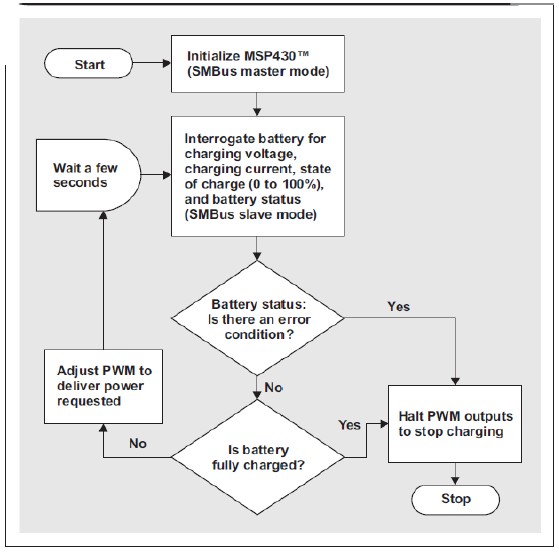
图 4 软件流程图简述
D1 二极管将两个放大器输出与一个逻辑 OR 组合。最低电压供给反相放大器(U3:D),其让误差信号极性在使用 DC/DC 控制器(这里为 TI 的 TPS40170)时为正确的。基本工作原理是:控制器尝试发送一个设定电流;同时,如果负载可以接受该电流,则控制器便调节为该电流级别。如果负载不接受全部电流,则电压开始上升,并最终达到 VOUT(max)。当出现这种情况时,电压环路接管,并对输出电压进行调节。
若想提高解决方案的安全性,功率级板上还要有过电压状态(高达100V)和反向电压连接(其正负极被交换)的保护电路。图 3 显示了这种电路。
输入电压反接时,反向电压保护由 MOSFETs Q7 和 Q9 以及 D2 来提供。这样便不允许对系统施加负电压。输入过电压保护由 MOSFET Q8 和 Q10 提供。齐纳二极管 D4,设置电路开始钳位的电压。一旦超出齐纳电压,FET 的栅-源电压便开始下降。这使FET工作在线性区域,并让微处理器继续得到供电。与此同时,DC/DC转换器关闭,而信号SD1和SD2被拉至接地。
软件实施与硬件实施同等重要。简要软件流程图已显示在图 4 中。微处理器通过 SMBus 询问电池,请求其想要的充电电压和电流。在确认这些值以后,它便设置两个 PWM 输出,以对到达电池的输出电压和电流进行调节。如果在任何时候,电池发布了一条充电警告,则 PWM 输出关闭。另外,一旦电池的充电状态达到 100% 或者设置的完全充电位,则 PWM 输出关闭。
电池充电期间,安全是最重要的问题。所有解决方案都应该有数个保护层。第一个保护层是具有内部保护 MOSFET 的智能电池本身。在充电期间,微处理器应定期(每隔 2 秒钟较好)与电池通信,对"电池状态"寄存器中的所有安全标志进行监控。要求响应的一些标志位包括过充电警告 (OCA)、终止充电警告 (TCA)、超高温警告 (OTA),以及完全充电 (FC) 状态。微处理器的板上模数转换器,可用作过电压或者过电流事件的二次检查。
结论
通过将一颗微处理器与一个宽输入电压 DC/DC 控制器配合使用,我们可以设计出一种完全可编程、宽输入电压电池充电器。本文为你介绍了一种解决方案,
- 用于移动微处理器的高性能、集成化电源 IC:并非仅适合便携式设备(08-23)
- 善用微处理器简化电源供应器设计(10-25)
- 如何轻松达成汽车功能的安全性?(05-07)
- 基于LPC2119的自主式移动机器人设计(04-30)
- 云计算+大数据:下一个系统设计关键所在(10-19)
- ARM微处理器在智能工业中有何应用?(02-28)