基于PIC单片机及图像处理技术设计的智能台球机器人
后DSP即发送开始采集指令给CPLD,实现总线控制权交接,CPLD获得总线控制权。通过CMOS采集一帧图像解码后存到FIFO存储器中,当一帧数据写入帧缓存后,CPLD关闭CMOS输出,放弃总线控制权,并发送信号给DSP,进入图像处理程序。DSP通过缓存器和CLPD获得图像数据,同时处理后数据传输到PIC进行电机控制部分。
我们采取的是一种基于DSP和CLPD结构的图像采集和处理系统设计方法。CPLD实质上起到总线控制器的作用,DSP制作图形算法使用,图像采集独立自主进行,不参与采集过程,节省了DSP的时间,实时性好,实现了模块化设计的思想。系统软件对图像进行灰度、边缘提取、反色的算法。
(三)、智能化系统的软件流程
1.、小车系统软件流程
1、1 伺服电机驱动电路
下图为伺服电动机驱动电路, 本系统有两组驱动电路, 分别负责两个后轮电动机的驱动, 控制电机的转向及转速(转角)。首先由单片机产生的PWM信号经接收通道进入信号解调电路BA 6688L的12脚进行解调, 获得一个直流偏置电压, 该直流偏置电压与电位器的电压比较, 由BA6688L 的3脚输出,送入电机驱动集成电路BAL6686, BAL6686 的输出信号驱动伺服电动机。改变PWM 信号的占空比,可以控制电机的转向和转速。
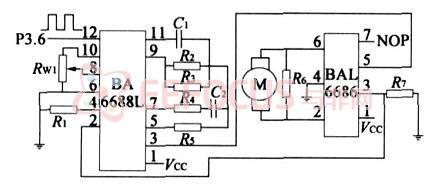
伺服电动机驱动电路
1、2 测速检测电路的设计与实现
霍尔集成传感器是将霍尔元件、放大器、施密特触发器以及输出电路集成在一块芯片上, 为用户提供一种简单化的和比较完善的磁敏传感器。霍尔传感器测速的原理: 传感器的位置固定在靠近小车车轮的适当位置, 小车的轮上装几个磁铁, 每当磁铁转过霍尔传感器时, 引起磁场的变化。霍尔集成传感器分为线性型和开关型两大类, 本系统中选用的是开关型霍尔集成传感器SS44E。SS44E 传感器的信号放大器将霍尔元件产生的幅值随磁场强度变化的霍尔电压放大后再经信号变换器, 驱动器进行整形,放大后输出幅度相等, 频率变化的方波信号脉冲, 计算脉冲的个数, 即可确定旋转物体的速度。如我们在小车的轴上安装了4块磁铁, 则车轮旋转一周霍尔传感器计数4个脉冲。用1m in计量的脉冲数除以4就是小车的转速。
2、球杆系统软件流程
在步进电机控制电路开始工作之前,需要对驱动器L297的主要参数进行初始化,然后对它进行将要运算控制的配置。
当导路小车到达击球距离范围内静止的时,单片机中断,并跳转到步进电机W1驱动电路,首先,单片机对步进电机驱动器M1进行初始化,然后驱动步进电机驱动器对步进电机W1进行初始化,单片机把相应频率的脉冲信号传送至驱动器M1,通过驱动器的缓存配置,控制电机W1按照要求的N个脉冲进行逆时针或者顺时针步进运行,直到旋转相应的α角后,电机W1驱动电路中断;单片机中断,跳出到伺服电机驱动电路W2,对伺服电机驱动器M2进行初始化,然后驱动伺服电机驱动器对伺服电机W2进行初始化,单片机把相应频率的连续脉冲信号传送至驱动器M2,通过驱动器的缓存配置,控制电机W2作顺时针连续旋转,直到旋转满一周后,电机W2驱动电路中断,电机W2旋转过程中带动机械曲柄滑块机构做急回运动,快速击打白球,使得白球运动击打彩球入袋。击球完毕,再次驱动电机W1逆向旋转α角,至原初始与球桌边缘平行的位置。则一次单片机控制击打制定目标球过程结束。
该球杆系统中,通过对图像处理后的目标结果进行定位,然后采用了高精度的单片机控制步进电机电子电路,伺服电机带动球杆机械运动和机构传动进行击球,实现了一个较为智能化的智能桌球机器人。
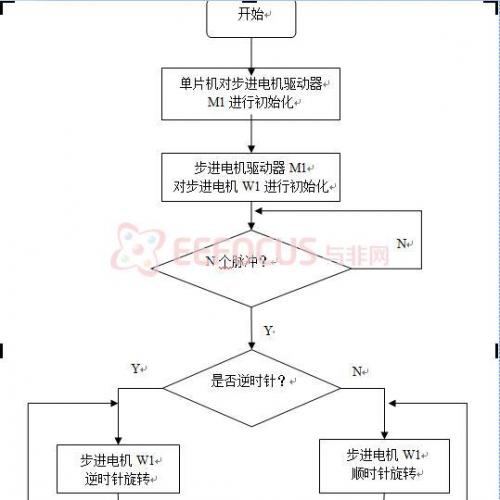
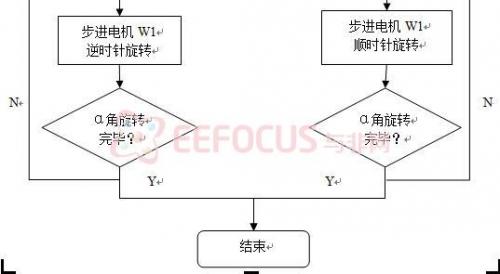
图3-2-1 控制步进电机W1旋转球杆角度的软件程序流图
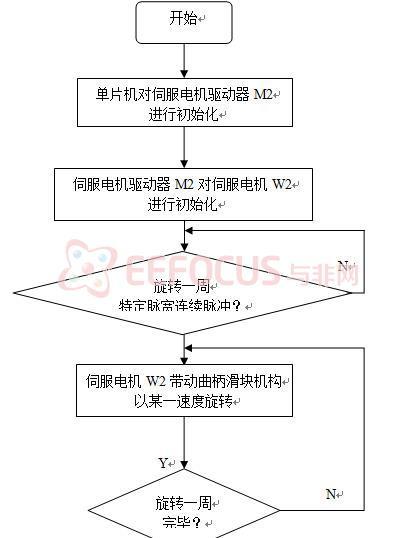
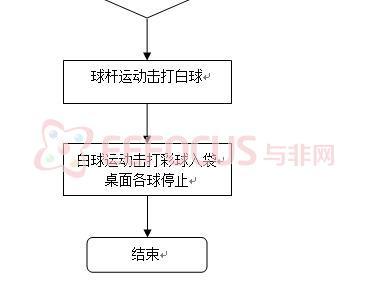
图3-2-2 伺服电机W2控制球杆击球的软件程序流图
- dsPIC33F系列DSC的 SD存储卡接口设计(01-05)
- 基于dsPIC30F2010的土壤水分测量仪的设计研究(08-27)
- 基于AD7862和dsPIC30F的数据采集系统(08-25)
- 基于DSPIC30F4011单片机的CAN总线通信设计(02-08)
- PICCl8编译器命令行驱动及其应用(02-11)
- 基于dsPIC33F系列单片机的应用程序升级方法(04-03)