基于PIC单片机及图像处理技术设计的智能台球机器人
器
美国Averlogic公司的大容量FIFO AL422B作为采集-处理的共享数据RAM。AL422B的存储容量为3MB。由于目前1帧图像信息通畅包含640*480个像素,每个像素占用1~3B,而市面上很多视频存储器由于容量限制,无法存储1帧图像的完整信息,其工作频率达50MHz。AL422B应用的要点如下:
1、384k*8b FIFO,支持VGA/CCIR/NTSC/PAL和HDTV分片率
2、独立的读/写操作可接受不同的I/O数据率
3、高速异步串行存取,读写时钟周期为20ns
4、输出使能控制,自行刷新数据
5、工作电压可为5V或3.3V
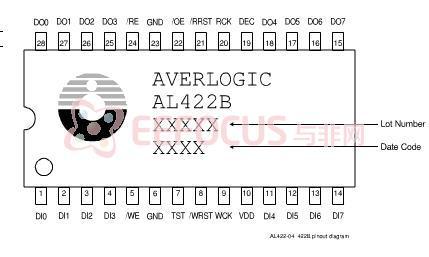
图1-3 FIFO AL422B结构图
1.2.3 CPLD视频采集器
这一部分的核心控制是由可编程门阵列FPGA发展为图像采集处理的高速化、小型化、智能化开辟了新的空间。核心控制CPLD选用Altera公司的EMP7128SL85-15,主要用它来完成FIFO写控制,通知DSP读数据信号的产生等功能。EPM7128SL85-15具有2500个可用逻辑门,128个宏单元,8个逻辑块,读写速度为15ns,带有67个可供用户使用的I/O引脚,PLCC封装,可通过JTAG接口实现在线片成。通过硬件描述语言(VHDL)在集成开发环境MAX PLUS Ⅱ下完成逻辑设计,提高了系统的可靠性,又降低了成本。CPLD的核心任务是是实现AL422B芯片的需要。
1.2.4 DSP数字信号处理器
采用TI公司的TMS320VC5402 DSP读取AL422B中的视频数据,并经过软件对其进行实时处理,处理后数据量将大大减少。TMS320VC5402 DSP主要特点如下:
先进的改造型哈佛结构,操作速率可达100MI/S。先进的多总线结构,3条16b数据存储总线和1条程序存储总线;40b算术逻辑单元,包括1个40b桶形移位器和2个40b累加器;一个17*17乘法器和1个40b专用加法器,允许16b带符号的惩罚;8个辅助寄存器及1个软件栈,数据/程序寻址空间1Mb*16b,内置4k*16bROM和16k*16bRAM;内置可编程等待状态发生器,锁相环时钟产生器,2个多通道缓冲串行口,1个8b并行于外部处理器通信的HPI口,2个16b定时器以及6个通道DMA控制器;低功耗,工作电源有3V和1.8V。
2、 智能运动系统
2.1 运载系统
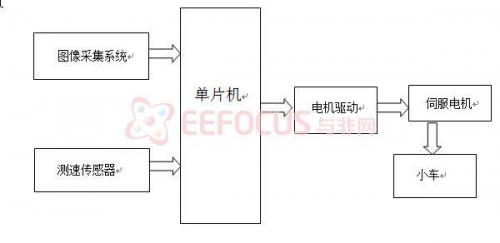
2.1.1 运载系统的原理框图
通过前面的图像处理系统计算出的击球点的位置,计算出小车的行进路线输出给小车的驱动系统,使小车行驶到指定地点。
2.1.2 运载实现系统的主要部件
1、 机器人小车驱动系统机器人小车驱动系统由控制器、功率变换器及电动机三个主要部分组成。
( 1) 电机数量的选择为了让小车能灵活转弯采用三轮小车, 前轮是拖动轮, 两个后轮分别用两台电机驱动。当分别改变两台电机方向时, 可以使小车前进、后退和转弯。
( 2) 电机种类的选择电动小车采用伺服电动机驱动系统。伺服电动机机械特性和调节特性均为线性, 动态响应快, 控制精度高, 可靠性高, 是自动控制系统中一种很好的执行元件。加上合适的驱动系统, 完全可以完成机器人的各种功能。
2、 车速及路程计算模块的选择
采用开关型霍尔集成片, 在车轮上均匀地固定多个磁铁, 车轮转动时产生脉冲, 通过脉冲的计数,对速度进行测量。用转速乘以车轮的周长, 就是小车行驶的路程。由于霍尔传感器体积小, 灵敏度高,传送过程中无抖动现象且检测安装简单, 广泛应用于电机测速系统。
3、 电源选择方案
根据小车需要不停地运动, 采用单一电源供电方案, 电方式比较简单,但由于电动机起动瞬间电流很大, 而且PWM 驱动的电动机电流波动较大, 会造成电源电压不稳, 影响其他电路的正常工作。此方案将电机驱动利用光电耦合器进行连接。这样可以解决由于PWM 驱动的电动机电流波动对系统稳定性的影响, 从而提高了系统的可靠性。
2.2 球杆系统
2.2.1 球杆系统的原理框图
根据图像处理分析所得的桌面各球分布情况,和单片机编程语言中所设定选择各球的顺序,确定了目标球的位置。小车运行至球杆能够击到白球的距离范围内,此小车移动过程中,球杆收至与球桌边缘平行的方向,电机W1和W2均停止转动。
到达击球范围内时,小车停止运行,根据图像处理结果,以小车所在边缘为基线,分析球杆所应该旋转的角度,把该信息赋予PIC32单片机,然后,通过单机片发送脉冲信号到步进电机驱动器M1,控制步进电机W1完成相应角度的旋转。旋转过程中,为了提高步进电机运行到位的,从起始到接近所需角度的过程中,可以用连续高频脉冲缩短时间,然后在接近预定值的时候,则选用间断低频脉冲控制电机点动到位,中断其运行。
接着,根据图像处理结果,分析其桌球运动的路径长度,在单片机中预设相应的长度范围,将其所需力度分为从高到低分为五档;接着,通过
- dsPIC33F系列DSC的 SD存储卡接口设计(01-05)
- 基于dsPIC30F2010的土壤水分测量仪的设计研究(08-27)
- 基于AD7862和dsPIC30F的数据采集系统(08-25)
- 基于DSPIC30F4011单片机的CAN总线通信设计(02-08)
- PICCl8编译器命令行驱动及其应用(02-11)
- 基于dsPIC33F系列单片机的应用程序升级方法(04-03)