基于PIC单片机及图像处理技术设计的智能台球机器人
单片机接收力度档位信息,发送相应的脉冲到伺服电机驱动器M2,使伺服电机W2分别以不同的速度连续转动一周,结束之后中断其运行。
由于电机W2的转动,带动曲柄滑块机构的球杆做急回运动,快速击球,然后较缓慢地返回原位置。
击球完毕,白球获得预定方向的速度接着进行击打彩球入袋,然后各球按照后续运动轨迹运行至动能为零静止。
等待桌面各球静止,重新扫描桌面情况,进行新一轮的图像处理分析,选择下一个击球目标,球杆旋转收回到与球桌边缘平行,小车运行至下一个目标的击球距离范围。
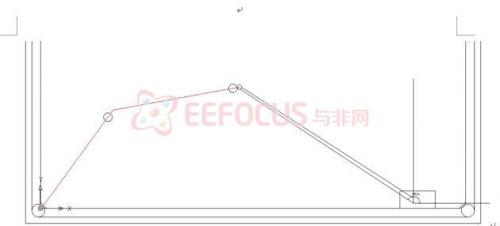
图2-2-1
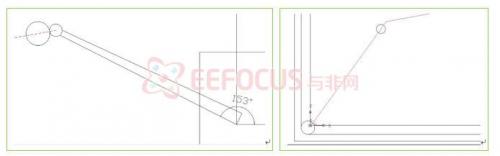
球杆击球路径分析
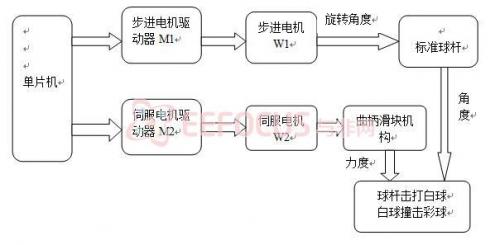
图2-2-2 球杆系统原理框图
2.2.1 球杆系统的主要部件
步进电机W1
W1用于旋转调整球杆部分的角度。
步进电机是数字控制电机,将脉冲信号转换成角位移,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,因此步进电机适用于单片机控制。步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲的信号频率决定。
直流伺服电机W2
W2用于控制球杆击球的速度。
伺服电动机机械特性和调节特性均为线性, 动态响应快, 控制精度高, 可靠性高, 是自动控制系统中一种很好的执行元件。加上合适的驱动系统, 完全可以按照准确的转速和转向完成各种功能。
步进电机驱动器L297芯片
步进电机的驱动是根据单片机产生的控制信号进行工作。因此,通过向步进电机驱动电路发送信号就能实现对步进电机的控制。
L297芯片是具有20管脚的双列直插式塑胶封装的步进电机驱动器。它最多可产生四相驱动信号,能用半步(八拍)和全步(四拍)等方式驱动单片机控制双相两极或四相单极步进电机。其核心是脉冲分配器,L297还设有两个PWM斩波器来控制绕线组电流。是想爱你恒流斩波控制。适用于双极性两相步进电机或单极性四相步进电机的控制。L297只需从上位机接受方向(正、反转),模式(半步、基本步距),时钟(步进脉冲)3个输入信号。其工作初始状态是ABCD=0101
L297驱动器M1的输出控制步进电机W1。
伺服电机驱动器BA6688L和BAL6686芯片
由单片机产生的PWM信号经接收通道进入信号解调电路BA6688L的12脚进行解调, 获得一个直流偏置电压, 该直流偏置电压与电位器的电压比较, 由BA6688L 的3脚输出,送入电机驱动集成电路BAL6686, BAL6686 的输出信号驱动伺服电动机W2。改变PWM 信号的占空比,可以控制电动机的转向和转速。
标准球杆
球杆击球端设置为圆球状光滑表面结构;中间部分套在固定的小车基座上;在小车基座的两固定端设计为一个曲柄滑块机构,控制球杆击打白球。
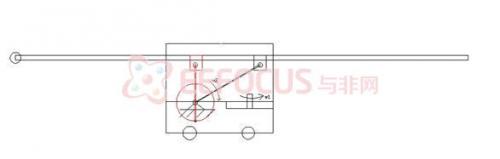
图2-2-3 小车基座上的球杆设计
3、单片机的选择
单片机选用microship公司的Cerebot 32MX4系列单片机。该Cerebot 32MX4的主要特点是具有一个全新Microchip® PIC32™微控制器。PIC32可提供工作频率80MHz的32位MIPS处理器内核、512KB的编程FLASH、32KB的RAM内存以及众多的外围设备。这些设备包括USB控制器、定时器/计数器、串口控制器、A/D转换器以及更多的设备。该板具有大量的I/O接口和电源选项,其中也包括USB电源。它同时还具有与Microchip MPLAB开发软件相兼容的内置编程、调试电路。 Cerebot 32MX4拥有九个Digilent Pmod™外围模块连接器。可连接的Digilent Pmod包括H-bridge驱动、模数和数模转换器、蜂鸣器、滑动开关、按键开关、LED指示灯、以及易于连接的转换器。
主要 用来实现对dsp数字信号处理器的部分数据进行处理,与单片机获得的其他系统信息进行综合分析,输出系统所需的控制信号,对其他部分的运动进行分析和控制。
三、软件流程
(一)系统软件流程
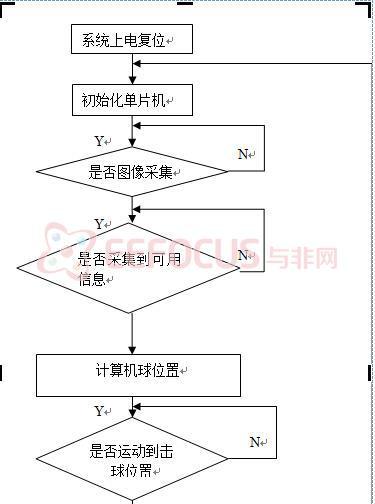
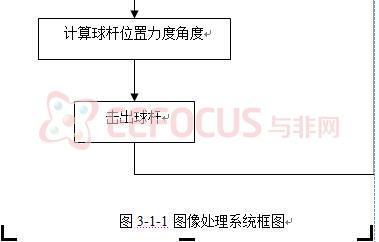
在每次工作之前都要对单片机进行初始化设置,然后再由单片机控制系统的运作,总流程如右图所示:
先启动图像处理系统,对采集到的信息进行分析和处理。得到击打台球的位置。根据图像处理系统的结果,通过单片机启动伺服电机,使小车运行到指定位置,然后控制步进电机调节球杆的角度,通过机械方式打击出球。
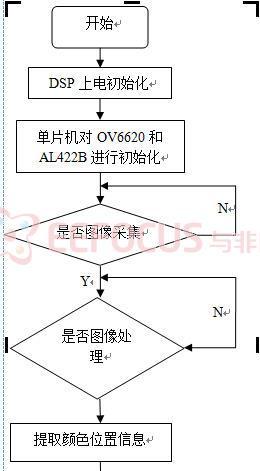
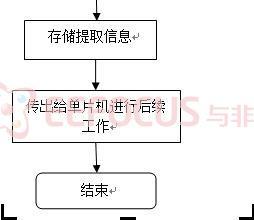
(二)、图像处理系统的软件流程
在CMOS摄像机开始输出信号之前,需要对OV6620的寄存器进行配置,使其输出系统所需要的图像格式。
在每次系统设定工作都要对CMOS寄存器进行设置,我们通过单片机对其进行初始化设置,主要是设置表中的寄存器。系统流程图如图2。系统执行上电加载DSP程序,初始化程序后,单片机初始化OV6620和AL422B芯片。然
- dsPIC33F系列DSC的 SD存储卡接口设计(01-05)
- 基于dsPIC30F2010的土壤水分测量仪的设计研究(08-27)
- 基于AD7862和dsPIC30F的数据采集系统(08-25)
- 基于DSPIC30F4011单片机的CAN总线通信设计(02-08)
- PICCl8编译器命令行驱动及其应用(02-11)
- 基于dsPIC33F系列单片机的应用程序升级方法(04-03)