基于DSP 56F801的正弦波输出DC/AC电源设计方案
4 56F801的软件设计
5617801软件主要由主程序、PWM模块的参数加载中断、输出电压滤波和闭环调节的定时中断和有关的保护中断等。
主程序主要完成相关寄存器和变量的初始化,并形成各个基于中断的功能模块的运行环境。
PWM模块的参数重载中断完成PWM波的输出。
由图2可见56F801对蓄电池和DC/AC环节进行检测并执行相应的保护,其中包括PWM模块的出错保护引脚所引起的中断。此中断完成短路保护的功能。
本电源装置还设置了由UC3846执行的直流输入侧的欠过压滞环保护,由56F801执行的交流输出侧的过载和短路保护和过热保护。当直流输入侧出现过欠压的时候,通过连锁信号关闭PWM波形发生器,同时封锁DC/DC变换器。在过载的时候,先延时一段时间,再关闭PWM发生器和封锁DC/DC,但如果在延时的这段时间内,负载恢复正常,则整个系统自动复位开始工作。
上述的脉宽表对于SPWM发生模块来说是离线的,而对于电压闭环控制模块来说则是在线的。由电压闭环控制模块计算出控制量,控制量的变化改变正弦调制波与三角波的交点,进而导致对脉宽表的刷新。为此需要按照调制波与三角载波的对称规则采样法,汁算出一个正弦波周期的每个SPWM波的脉宽宽度,在内存中安排一个表格存储各个脉冲的脉宽值。
本系统采用有效值的单闭环反馈控制方案,其控制结构如图4所示。 
在56F80l中运行的调节器采用前置滤波PID算法。由于采样电路中的高频干扰可能导致控制失误,因此在PID的前端采用了一阶滞后滤波器作为前置滤波。这种方法是先把所采集的误差信号用一阶滞后数字滤波器进行滤波后得到较为准确的误差采样值Ek,送到PID控制器求出控制量输出△Uk。 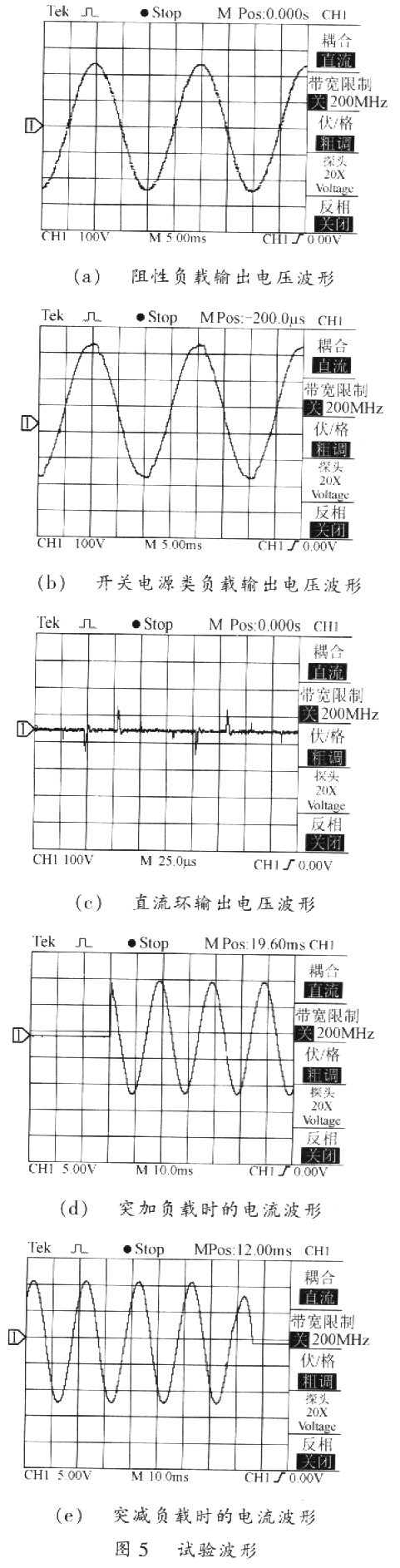
一阶滞后滤波器的传递函数为 ![]()
式中:e(s)为实际的包含高频干扰的误差采样值;
E(s)为滤波后的消除了高频干扰的误差。
用差分反演法离散化后的差分方程为 ![]()
式中:ek为本次偏差采样值;
Ek和Ek-1为本次和上次滤波值。
式(3)中 ![]()
式中:T为滤波时间常数;
T为采样周期
数字PID采用增量式算法为 ![]()
而采用式(6)则可简化计算机的运算: ![]()
依据△Uk便可得到Uk,进而得到新的脉宽表,并对有关的存储区进行刷新。
5 实验结果与结论
基于以上方案制造了一台样机并进行了相关试验。考虑到此类电源供电的负载一般为开关电源类容性负载,因此分别做了纯阻性负载和开关电源类容性负载试验。
试验参数:蓄电池直流电压24V;DC/DC变换器输出的直流360V;DC/AC环节三角载波频率9.6kHz,正弦调制波频率为50Hz,凋制比M=O.9;直流侧电容C1=l000μF;输出滤波电感L2=2mH,滤波电容C2=5μF。
试验波形结果可看出,DC/DC变换器输出的直流电压波动小。由于采用DSP56F801控制芯片,输出波形即使在容性负载时,波形畸变也很小,波形质量高。经测试输出波形的谐波畸变(THD)在空载时为O.9%,阻性负载时为1.8%,开关电源类负载时为2.6%。
样机的体积很小。由于采取了软硬件抗干扰的措施,使整个系统的可靠性得到增强。
- 基于DSP 56F801的正弦波输出DC/AC电源设计(08-10)
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)