磁浮列车模型定位系统的设计
摘要:基于磁浮列车的特点,介绍了一种新型磁浮列车定位系统的实现,在磁控开关组编码技术的基础上,采用FPGA和DSP相结合的结构,完成对该定位系统的设计。实验结果表明该设计能够实现磁浮列车的定位功能,具有工作简单可靠、制造成本维护成本低廉等优点。
磁浮列车是由无接触的电磁悬浮、导向和驱动系统组成的新型交通工具。该模型车利用同定在车辆悬浮架上的悬浮电磁铁与轨道之间的吸引力实现悬浮;利用固定在悬浮架上的导向磁铁与线路侧向的导向轨之间的吸引力进行导向;利用短定子直线感应电机,通过安装在车上的初级绕组产生行波磁场在轨道反应板中感应出电流,二者相互作用推动机车前进。
磁浮列车运行时,运行控制系统必须随时掌握列车的确切位置和速度,为此必须有一套定位系统实现对列车的实时定位。由于磁浮列车运行时与轨道没有物理接触,定位方法多采用无线方式来完成。目前,实现列车定位的方法有很多种,如光电感应定位测速、微波定位测速、交叉感应回线定位测速、GPS定位测速、无线扩频通信定位法等。这些定位测速方法有些结构复杂,定位精度差,有的需要大量的轨旁设备,前期成本和后期维修费用高。针对磁浮列车的特点,本文提出了一种新的定位方法,该方法制造成本低,维护方便,适用于短途运营的磁浮列车。
1 定位系统工作原理
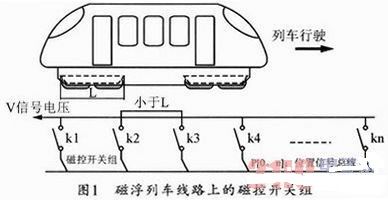
本文采用磁控开关编码定位技术,利用磁控开关在磁场内导通的原理,当磁浮列车经过磁控开关时,由于悬浮电磁铁与轨道间存在磁场,在该磁场的作用下,磁控开关导通;当磁浮列车驶过后,磁场消失,磁控开关断开。把所有磁控开关导通和断开的状态编码成二进制数字序列,每一个序列对应一个磁浮列车的位置。
将一定数量的磁控开关等间距排放在磁浮列车的线路上,这一距离不能大于磁浮列车电磁铁的长度,否则就无法保证列车运行过程中始终有磁控开关被触发,为了保证磁控开关能够被电磁铁和轨道间的磁场触发而不能被电机产生的磁场触发,磁控开关安装轨道外侧。为了避免磁控开关出现故障,每两个磁控开关采用并联方式组合成一个单元,固定安装在保护块里。将所有的磁控开关的状态(导通-1;断开-0)整合成一个二进制数字序列,在列车行驶的过程中,这个数字序列将一直变化且不会重复,每一个数字序列对应一个列车的位置见图1。对这些数字序列进行采集和逻辑分析就可以得到列车的位置量。
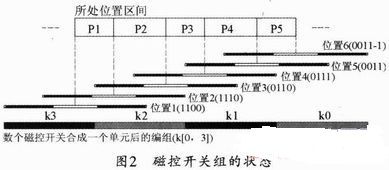
列车运行时,布置于线路上的磁控开关组的状态能够反映出列车的位置量,以四个通过并联方式合并后的磁控开关组为例说明这一问题如图2所示。磁浮列车向有行驶,上方的六根横线表示列车的六个位置,这六个位置处于磁控开关变化的临界状态,横线两端的黑色部分为固定在车辆悬浮架上的电磁铁,下方为四个合并后的磁控开关组。当电磁铁与开关重合时,该开关被触发。位置总线的状态依次为:1100、1110、0110、0111、0011、0011-1,最后一个状态需要加入第五个开关量。以列车的中心位置为参考,这六个状态可以确定五个位置区间,即P1到P5。
2 系统的硬件设计
将整个线路分为若干个区间,每个区间等间距排放并联后的磁控开关组,并且配备有信号处理模块和通信接口如图3所示。因此每个区间具备独立分析区间内的磁控开关组状态的能力,把磁控开关组的变化情况通过位置信号总线送入信号处理模块,处理后能够获得列车在该区间内的相对位置量,并将此位置量由通信接口经CAN总线发送到控制中心,控制中心根据预先设定的此区间的位置信息最终确定列车的位置。当列年位于两个区间的结合处时,两段的通信部件会同时发出位置信号,由控制中心综合分析得出列车的位置。
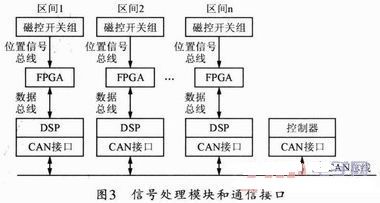
本设计信号处理模块的核心硬件由FPCA和DSP组成,其中FPGA选用型号为XC2S50,用于处理由位置信号总线输入的磁控开关的状态量,从而确定出列车所在的位置区间,并将运算结果由数据总线送入型号为TMS320C2812的DSP器件,用来计算列车的速度和加速度。并利用存储的列车在前一区间的速度和加速度的值来计算出列车的位置,最后将位置值和速度量由CAN接口送入CAN总线。
3 系统的软件设计
在该定位系统中,信号源来自磁控开关组,软件设计的主要任务在信号处理模块中。在数字电路中,时钟脉冲信号是重要的信号之一。从经济和电路体积结构上讲,往往采用一个高频品振产生一种高频率的脉冲,再利用其他的分频方法进行分频,从而产生需要频率的脉冲。本文采用30 MHz的品振经过千分频得到需要的30 kHz。
N分频电路的设计思想是对输入脉冲每N/2个周期响应一次,利用简单的边沿触发
- 磁浮列车同步485通信方式的研究(12-16)
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)