基于ARM与DSP的嵌入式运动控制器设计方案
时间:04-11
来源:3721RD
点击:
图2是该平台的X轴驱动原理图[1],Y轴驱动与X轴驱动电路相同。图中M为伺服电机,EC是编码器。将伺服驱动器的"控制模式"设置为"位置控制",把指令脉冲设置为CW/CCW方式。S3C2410按流程图操作MCX314As,设置相应的运动参数,写入功能命令,即可完成对平台的运动轨迹控制。
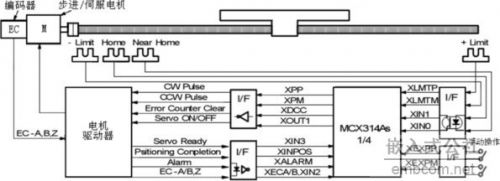
图2 单轴信号驱动系统的接口示意框图
结语
运动控制系统在工业控制中的应用比较广泛,MCX314As是高集成度的运动控制专用芯片能实现四轴三联动的位置、速度、加速度控制和直线、圆弧、位元3种模式的连续插补和位置闭环控制。而ARM处理器具有强大的32位RISC性能,体积小、功耗低。用ARM与专业运动控制芯片设计运动控制器能大大减轻研发任务,加快研发速度,可以在较短时间内得到控制性能优异的嵌入式运动控制系统。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)