基于FPGA的多DSP红外实时图像处理系统电路设计
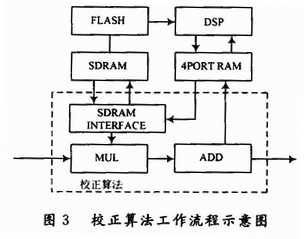
两点校正公式为:V’=GV+O。其中,V为探测器单元的实际输出值,V’为校正后的值,G为校正增益,O为校正偏移量值。G和O利用测量两个不同温度点的探测器响应计算得出,预先存入FLASH芯片中。系统正常工作时,DSP将系数从FLASH芯片中读出非均匀性校正算法所需的系数,用乒乓方式写入四端口RAM中。每写完1块数据区后利用四端口RAM的中断信号通知FPGA将系数读走,FPGA将得到的系数依次存入SDRAM中。系数传送完毕后,FPGA开始接收探测器数字图像信息,同时将校正系数读出,对原始红外图像进行乘加运算。工作流程见图3。
2.2 图像拉伸算法设计
图像拉伸采用自适应直方图增强算法,表示为如下的映射关系:
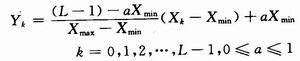
式中:yk为增强后图像的灰度值;Xmax和Xmin为原图像中像素最大值和最小值;Xk为原图像的灰度值;a为亮度补偿系数,取值为0~1之间,当取0时,即是通常的拉伸算法。
考虑到红外图像中可能存在盲元和噪声,Xmax和Xmin不宜取原图像中最大最小值。采用分位数法来取图像中的最大值和最小值可以把盲元和噪声的影响降到最低,分位数根据盲元和噪声情况具体确定,一般可取5 %。
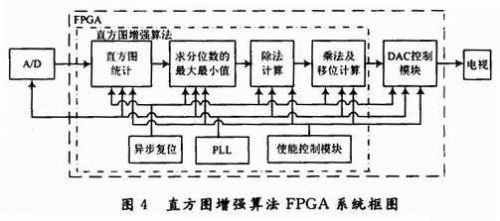
图4给出了直方图增强算法的FPGA系统框图,A/D转换后的14 b数据流进入直方图统计模块计算每一像素点的直方图,根据设定好的分位数计算图像中像素的最大值和最小值。在每一帧有效数据结束后,根据直方图统计得到的最大值和最小值,计算灰度映射的除法,这样每帧只需计算1次除法,而不用对每一像素进行除法计算。之后对得到的因子对每一像素进行乘法及移位计算即可得到直方图增强算法处理后的图像数据。增强后的图像数据通过DAC控制模块送入电视显示。
3 结语
针对红外试试图像处理系统构建的FPGA+多DSP的硬件平台,利用FPGA进行调度和时序控制,有效的使3个处理器并行工作,大大提高了系统处理能力。研究并实现了从红外探测器数据采集到图像校正、图像处理,以及图像显示的整个流程。系统已应用于工程实践中,对于空间质量要求苛刻的高性能处理系统有一定的借鉴意义。
作者:吕 雷 王明昌 秦金明
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 基于FPGA的快速并行FFT及其在空间太阳望远镜图像锁定系统中的应用(06-21)
- 3DES算法的FPGA高速实现(06-21)
- 用FPGA实现FFT算法(06-21)
- FPGA的DSP性能揭秘(06-16)