基于高速双DSP的柔性机载实时图像跟踪系统研究
时间:10-21
来源:ednchina
点击:
、运行模式、系统维护模式,可由系统程序来控制三种模式的切换。
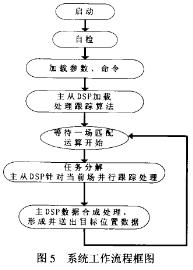
在复位和初始化模式下,系统启动后将由主从DSP同步实现程序搬移,把程序代码搬移到片内并运行系统程序,从而初始化主从DSP的运行环境并设置相关参数。
运行模式下,双DSP一方面独立响应并处理FPGA中断、运行核心跟踪算法并实现子系统内的进程调度;另一方面通过主从DSP串口间的互连响应中断以及主DSP串口与远程主机的通讯等功能来实现双DSP子系统间和双DSP系统与外部主机的进程调度。
系统维护模式下,主从DSP在进行系统自检后,可由远程主机通过RS422接口与主DSP进行通讯,以实现程序的更新下载和参数修改等功能。图5为系统软件工作流程框图。
5 结束语
笔者对该系统的实时性进行了仿真测试,结果分析表明:
(1)单DSP只能实现开窗搜索,高速场合下一旦目标逃逸搜索区,将导致目标丢失;而本系统能够实现基于整场搜索的大运算量高速处理,从而加大了被跟踪目标搜索区的动态范围,避免了目标丢失情况的发生,进一步提高了实时跟踪的可靠性。
(2)传统单DSP系统一般只能实现基于一帧的匹配性能,而本系统可实现基于逐场的跟踪匹配,进一步提高了跟踪系统的实时性。
(3)根据实际场合的需要,本系统可通过软件选择加载跟踪算法,从而极大的增强了系统的通用性和易维护性,体现出柔性处理系统的特色。
由此可见,双DSP柔性处理系统为复杂场景下快速移动目标的高速识别与跟踪提供了一个有效的实现方案,同时也为机载实时图像跟踪系统提供了新的高速处理平台。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)