基于DSP的交流异步电机高精度调速系统设计
输出24 mA电流,其中A端为5 V电平,B端为3.3 V电平。
2.5 霍尔电流传感器
霍尔电流传感器是利用霍尔效应来测量电流的,不仅能测直流电流,也能测交流电流,测量精度和量程比电流互感器高,受温度影响很小,且不会产生电流过载。霍尔电流传感器的功耗极低,这是其他互感器无法达到的。系统采用QBC-SY/SYW系列闭环霍尔电流传感器,该系列电流传感器的初、次级之间是绝缘的,具有超强抗干扰能力,用于测量直流、交流和脉动电流。交流互感器连接图如图3所示。
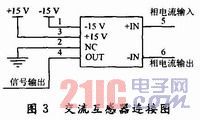
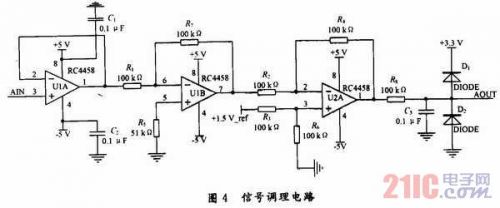
该款传感器集成了调理电路,在最大可测量输入电流3 A条件下,输出电压4 V。由于驱动电机的额定输入电流为1.12 A,所以其最大输出电压可达,但这并不符合TMS320F2812的输入要求,故还需要另加上一组信号调理电路,将输出电压从±1.5 V调理到0~3 V,才能符合DSP内部3.3 V A/D参考电压的要求。
信号调理电路需使用RC 4558和TLV431两种芯片,其中RC 4558为双路高性能运放;TLV431为低压可调精密分流稳压器,用作输出一个1.5 V的恒定电压供给信号调理电路使用。信号调理电路工作原理为:当电压信号输入时,先利用放大器作一级跟随处理,然后进行反相,最后进行加法运算。具体电路图如图4所示。
2.6 旋转编码器
为了实现矢量控制,就必须对电动机的实际转速进行测量,因为TMS32F2812本身的事件管理器中有正交编码脉冲电路,用于连接光电编码脉冲以获得旋转机械的位置和速率,方案中转速测量就采用旋转编码器。
系统综合考虑后选择了ELTRA公司的EL40A1024Z5增量式编码器作为系统得测速单元。其分辨率达到了1 024脉冲/转,带有零脉冲,输出电平为NPN集电极开路输出,可直接连接DSP,测量转速最高可达6 000转。
TMS320F2812有两个事件管理器(EVA、EVB),每个事件管理器(EV)模块都有一个正交编码器脉冲(QEP)电路,它们可以直接与编码器相连,用来检测转速。如果电路被使能,那么可以对从CAP1/QEP1和CAP2/QEP2(EVA)或CAP4/QEP3和CAP5/QEP4(EVB)引脚上输入的正交编码脉冲进行解码和计数。当QEP电路被使能,CAP1/CAP2和CAP4/CAP5引脚上的捕获功能将被禁止。
3 系统软件设计
系统软件采用模块化设计,可以分为2个部分;主程序和中断服务子程序。
主程序中对硬件和变量进行初始化,对各个控制寄存器置初值,对运算过程中使用的各种变量分配地址并设置相应的初值。初始化模块仅在DSP上电复位后被执行一次,然后进入循环等待时期,如图5所示。
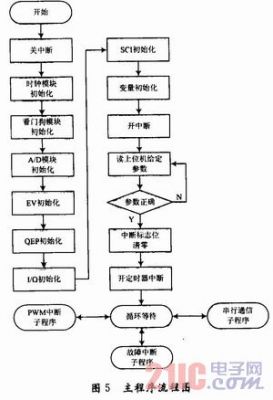
中断服务子程序是系统的核心部分,包括PWM中断服务子程序,故障保护中断服务子程序,串行中断服务子程序。其中PWM中断服务子程序负责对电流A/D转换、速度计算、矢量变换、SVPWM输出等。故障保护中断服务子程序在系统出现故障时,将会立即禁止PWM输出。串行中断服务子程序则负责DSP与PC上位机之间的通信,如图6所示。
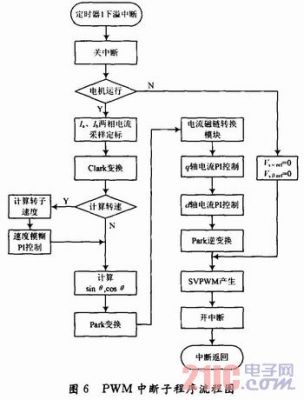
初始化之后,系统的运行交由中断服务子程序控制。PWM中断服务子程序负责两相定子电流的采样,转速的计算,矢量变换以及SVPWM调制,是系统实现矢量控制的核心部分。系统采用模块化编程,把PWM中断服务子程序分为电流采样模块,电机转速计算模块,矢量控制坐标变换模块,模糊PI调节模块,SVPWM调制模块。
4 结语
针对交流调速的特点,设计了一套基于DSP的交流异步电机高精度调速系统。该系统应用矢量控制技术作为系统的总体控制方案,以TI公司电机控制专用的高速DSP TMS320F2812为系统的核心处理器,三菱电机公司的PS21246智能功率模块(IPM)为逆变器件,在此基础上运用空间电压矢量脉宽调制(space vector pulse width modulation,SVPWM)技术和PI控制算法,构建了一个基于TMS320F2812 DSP的交流异步电机高精度控制平台。实验表明,系统基本满足高精度调速要求,十分适合于伺服控制系统。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)