基于嵌入式Linux的倒车影音系统设计
引言
电子信息与数字图像处理技术目前已被广泛地应用在各个领域,车载系统的信息化已成为现代汽车业的重要标志。现在的倒车雷达系统可以为驾驶者提供许多帮助,多数采用超声波测距技术,可以直接显示出车尾与障碍物之间的距离。但由于超声波的散射特性,如果地面有尖锐的突起或存在横在半空的棱角状物体,系统就不能有效地"察觉"。假如能为现有的倒车系统增加一个可视功能,那么驾驶员在倒车时不必回头就可清楚车后的情况。本文设计了一种可视化安全倒车系统,该系统采用嵌入式Linux操作系统内核驱动USB摄像头实现车后状况实时监控,通过判断超声波测距是否达到阈值来启动语音报警功能。
1 系统方案设计
如图1所示,系统由主控模块、超声波收发模块、USB摄像头图像采集模块、语音报警模块与LCD显示模块等。主控模块采用三星公司基于ARM9内核的S3C2440微处理器,主频最高可达533 MHz,处理速度快。采用软件编程技术实现对其外围电路的控制,并提供外围电路所需的各种信号,简化了外围电路的设计难度。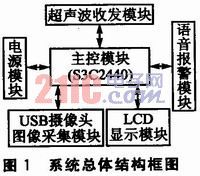
2 系统硬件设计
2.1 主控模块
以S3C2440为核心的主控模块硬件平台的组成如图2所示。
2.2 超声波发射电路
超声波发射电路原理图如图3所示。发射电路主要由反相器74LS04和超声波发射换能器T1构成,使用CPU内部的PWM定时计数器输出的40 kHz方波信号。

一路经一级反相器(U1C与U1E并联组成一级)后送到超声波换能器的一个电极(T1的1脚);另一路经两级反相器(U1D为第一级,U1B和U1A组成第二级)后送到超声波换能器的另一个电极( T1的2脚 )。用这种推换形式将方波信号加到超声波换能器的两端,可以提高超声波的发射强度。输出端采两个反相器并联,以提高驱动能力。上位电阻R1、R2一方面可以提高反相器74LS04输出高电平的驱动能力,另一方面可以增强超声波换能器的阻尼效果。
2.3 超声波接收电路
超声波接收电路原理图如图4所示。CX20106A是一款红外线检波接收的专用芯片,常用于电视机红外遥控接收器。其优点是简单易用,电路连接简单,且减少了生产调试的麻烦。当CX20106A接收到40 kHz的信号时,会在第7脚产生一个低电平下降脉冲,这个信号可以接到ARM的外部中断引脚作为中断信号输入。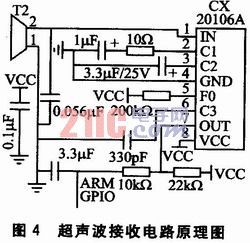
2.4 USB摄像头图像采集模块
采用中星微电子ZC0301芯片组的USB数字摄像头。与模拟摄像头相比,其优势在于:CMOS图像传感器能直接产生图像原始数据;硬件支持标准的JPEG压缩;具有主流高速的USB总线设备接口等。对摄像头而言,USB总线的上的信息传输类型通常采用的是实时传输。USB设备端提供若干通信端口,主机与端口间建立起逻辑上的通信管道,进行数据传输。在摄像头的设备初始化阶段,主机与0号端口通信,驱动程序检测摄像头型号和所有端口信息。进入数据传输阶段,主机与探测到的实时输入端口建立通信管道,实时回传摄像头拍摄到的图像数据。
2.5 语音报警模块与LCD显示模块
语音报警模块采用的是安徽中科大讯飞信息科技有限公司生产的XF-S3011中文语音合成芯片。它是一款针对嵌入式应用领域而设计的单芯片处理器,具有合成任意中文文本的能力。XF-S3011通过串口(UART)接收上位机发送的命令和数据,命令和数据是以帧的方式进行封装与发送,允许发送的数据最大长度为200个字节。其驱动电路是用三极管驱动方式设计的。当超声波测得的距离小于所设置的阈值时,由S3C2 440发送控制命令给XF-S3011,启动语音报警提醒驾驶员注意。显示模块使用的是东华3.5寸TFT LCD(分辨率是320×240),采用嵌入式Linux下的Frame Buffer设备来驱动LCD。
3 系统软件设计
本文选择嵌入式Linux操作系统。它具有可裁剪、内核稳定、功能强大、支持多种硬件平台等特点。首先,在一台装有Linux操作系统的PC机(宿主机)上建立一个交叉编译开发环境,把S3C2440控制模块作为目标板。然后,采用移植性较好的C语言在PC机上编写本设计所需的底层驱动程序及顶层的应用程序,再利用交叉编译调试工具编译、链接生成可执行代码,最后向目标板移植。
3.1 视频图像采集及LCD显示程序的设计
第l步,采用动态加载ZC0301组芯片的USB摄像头驱动程序spca5xx。此驱动程序源代码由4个部分组成:设备模块的初始化模块、卸载模块、上层软件接口模块和数据传输模块。把它放在kernel/driver/usb下解压,打补丁。在编译系统内核时,在arm linux的kernel目录下进行make menueonfig;在<*>下选择Multimedia device下的Video for linux,加载Vide04linux模块,为视频采集设备提供编程接口函数和相关数据结构;(M)选中SPCA5XX这一项。
第2步,使用Linux的Video4linux来访问USB摄像头设备,进行视频图像采集,捕获实时的数据流。程序流程如图5所示。
- 基于LPC2138和μC/OS II的超声波测距系统设计(01-14)
- 51单片机加HC—SR04超声波测距仪用LCD1602显示(12-02)
- 51单片机驱动超声波测距模块C51程序(11-30)
- 简单的单片机超声波测距板(11-30)
- 超声波测距电路+汇编程序(11-30)
- 一款超声波测距模块运用程序(11-30)