Linux 时钟管理
Linux 中的定时器
在 Linux 内核中主要有两种类型的定时器。一类称为 timeout 类型,另一类称为 timer 类型。timeout 类型的定时器通常用于检测各种错误条件,例如用于检测网卡收发数据包是否会超时的定时器,IO 设备的读写是否会超时的定时器等等。通常情况下这些错误很少发生,因此,使用 timeout 类型的定时器一般在超时之前就会被移除,从而很少产生真正的函数调用和系统开销。总的来说,使用 timeout 类型的定时器产生的系统开销很小,它是下文提及的 timer wheel 通常使用的环境。此外,在使用 timeout 类型定时器的地方往往并不关心超时处理,因此超时精确与否,早 0.01 秒或者晚 0.01 秒并不十分重要,这在下文论述 deferrable timers 时会进一步介绍。timer 类型的定时器与 timeout 类型的定时器正相反,使用 timer 类型的定时器往往要求在精确的时钟条件下完成特定的事件,通常是周期性的并且依赖超时机制进行处理。例如设备驱动通常会定时读写设备来进行数据交互。如何高效的管理 timer 类型的定时器对提高系统的处理效率十分重要,下文在介绍 hrtimer 时会有更加详细的论述。
内核需要进行时钟管理,离不开底层的硬件支持。在早期是通过 8253 芯片提供的 PIT(Programmable Interval Timer)来提供时钟,但是 PIT 的频率很低,只能提供最高 1ms 的时钟精度,由于 PIT 触发的中断速度太慢,会导致很大的时延,对于像音视频这类对时间精度要求更高的应用并不足够,会极大的影响用户体验。随着硬件平台的不断发展变化,陆续出现了 TSC(Time Stamp Counter),HPET(High Precision Event Timer),ACPI PM Timer(ACPI Power Management Timer),CPU Local APIC Timer 等精度更高的时钟。这些时钟陆续被 Linux 的时钟子系统所采纳,从而不断的提高 Linux 时钟子系统的性能和灵活性。这些不同的时钟会在下文不同的章节中分别进行介绍。
Timer wheel
在 Linux 2.6.16 之前,内核一直使用一种称为 timer wheel 的机制来管理时钟。这就是熟知的 kernel 一直采用的基于 HZ 的 timer 机制。Timer wheel 的核心数据结构如清单 1 所示:
清单 1. Timer wheel 的核心数据结构
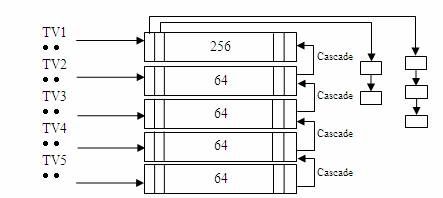
| #define TVN_BITS (CONFIG_BASE_SMALL ? 4 : 6) #define TVR_BITS (CONFIG_BASE_SMALL ? 6 : 8) #define TVN_SIZE (1 << TVN_BITS) #define TVR_SIZE (1 << TVR_BITS) #define TVN_MASK (TVN_SIZE - 1) #define TVR_MASK (TVR_SIZE - 1) struct tvec { struct list_head vec[TVN_SIZE]; }; struct tvec_root { struct list_head vec[TVR_SIZE]; }; struct tvec_base { spinlock_t lock; struct timer_list *running_timer; unsigned long timer_jiffies; unsigned long next_timer; struct tvec_root tv1; struct tvec tv2; struct tvec tv3; struct tvec tv4; struct tvec tv5; } ____cacheline_aligned; 以 CONFIG_BASE_SMALL 定义为 0 为例,TVR_SIZE = 256,TVN_SIZE = 64,这样 可以得到如图 1 所示的 timer wheel 的结构。 在 timer wheel 的框架下,所有系统正在使用的 timer 并不是顺序存放在一个平坦的链表中,因为这样做会使得查找,插入,删除等操作效率低下。Timer wheel 提供了 5 个 timer 数组,数组之间存在着类似时分秒的进位关系。TV1 为第一个 timer 数组,其中存放着从 timer_jiffies(当前到期的 jiffies)到 timer_jiffies + 255 共 256 个 tick 对应的 timer list。因为在一个 tick 上可能同时有多个 timer 等待超时处理,timer wheel 使用 list_head 将所有 timer 串成一个链表,以便在超时时顺序处理。TV2 有 64 个单元,每个单元都对应着 256 个 tick,因此 TV2 所表示的超时时间范围从 timer_jiffies + 256 到 timer_jiffies + 256 * 64 – 1。依次类推 TV3,TV4,TV5。以 HZ=1000 为例,每 1ms 产生一次中断,TV1 就会被访问一次,但是 TV2 要每 256ms 才会被访问一次,TV3 要 16s,TV4 要 17 分钟,TV5 甚至要 19 小时才有机会检查一次。最终,timer wheel 可以管理的最大超时值为 2^32。一共使用了 512 个 list_head(256+64+64+64+64)。如果 CONFIG_BASE_SMALL 定义为 |
- stm8s开发(五) TIMER的使用:定时!(09-18)
- STM8S Timer2_OC1_PWM1输出模式(12-03)
- TimerA流水灯问题分析(12-02)
- LPC2103之timer0 ang timer1(11-29)
- MSP430F5529 (六)定时器Timer_A-1(11-28)
- MSP430F5529 (六)定时器Timer_A-2(11-28)