MSP430F5529 (六)定时器Timer_A-1
时间:11-28
来源:互联网
点击:
MSP430F5529共有两类共4个定时器,分别是Timer_A定时器3个和Timer_B定时器1个,按照每个寄存器配备的捕获/比较器的个数分别命名为Timer0_A(内有5个捕获比较器)、Timer1_A(3个)、Timer2_A(3个)、Timer0_B(7个)。
这一章,我们讲定时器Timer0_A.(A类的都一样)
注意:下面所提到的所有寄存器,在TA后面插入0或1或2就分别表示Timer0_A、Timer1_A、Timer2_A(我这里省略了数字)
定时器很重要啊!
6.1 简介一下
定时器A是一个复合了捕获/比较寄存器的十六位的定时(加减)计数器。定时器A支持多重捕获/比较,PWM输出和内部定时,具有扩展中断功能,中断可以由定时器溢出产生或由捕获/比较寄存器产生。
特征简介:
○四种运行模式的异步16位定时/计数器
○自身时钟源可选择配置
○最多达5个可配置的捕获/比较寄存器(CCR)
capture/compare registers
○可配置的PWM输出
○异步输入和输出锁存
○对所有Timer_A中断快速响应的中断向量寄存器
下面这张图形象的解释了Timer_A的结构特性

6.2 TA(Timer_A)的几个基本操作设置(含寄存器介绍及设置)
声明:所有寄存器同样支持字和字节操作,不要忘记这是什么意思
所有寄存器初始化都为0x0000
6.2.1 TA控制寄存器TACTL(最常用最基本)
再次说明一下例如:TA0CTL、TA1CTL、TA2CTL分别表示3个不同
定时器A的控制寄存器
rw-(0)表示默认读写均为0
 TASSELx:时钟源选择。尽量不要选TASSEL0-TACLK外部时钟源,因为如果TACLK和CPU时钟不同步,很容易出问题。(TA0CLK接P1.0引脚)
TASSELx:时钟源选择。尽量不要选TASSEL0-TACLK外部时钟源,因为如果TACLK和CPU时钟不同步,很容易出问题。(TA0CLK接P1.0引脚)
00TACLK
01ACLK
10SMCLK
11~TACLK
IDx:第一次分频控制。ID0-1分频;ID1-2分频;ID2-4分频;ID3-8分频
MC:工作模式控制。(建议在修改定时器运行模式前先停止定时器(中断使能、中断标志、TACLR例外),以避免产生未知的误操作。)
00停止模式:定时器停止
01增模式:定时器计数到TACCR0
10连续模式,定时器计数到0FFFH
11增减模式:定时器加计数到TACCR0然后减计数到0000H
TACLR:定时器清零位。该位置位会复位TA寄存器,时钟分频和计数方向。
TACLR位会自动复位并置0
TAIE:定时器中断使能
0:中断禁止
1:中断允许
TAIFG:中断标志位
0:没有中断发生
1:有中断挂起
6.2.2 计数值存放寄存器TAR
①显然,最大存放计数值为0xFFFFh;
②(类似51单片机)可以被用来存放一个初值,然后选用连续模式。这样不断计满再手动填充,从而达到精确计时的效果;
③默认为0,且对该寄存器可以直接赋值;
6.2.3 扩展寄存器TAEX0
很简单,这个寄存器就是为了控制时钟源的二次分频(看结构图)。
该寄存器的低3为定义为TAIDEX:000-111分别表示1-8分频
6.2.4 捕获/比较寄存器TACCR0-TACCR4(共5个)
比较模式下,用来设定计数终值;
捕获模式下用来将捕获的TAR值存放进TACCRx中。
6.3 MC控制的四种工作模式的详细讲解
6.3.1 MC=0停止模式
这是系统默认的模式,定时计数器禁止工作。
6.3.2 MC=1增模式
总结几句话:(红色标记的很重要)
①此模式下严禁从0xffff开始计数;
②注意从0计到TACCR0,实际上记了TACCR0+1个数;
③计到TACCR0后,会回到0重新开始计数;
④如果TAR的值大于TACCR0,这时候会立即从0开始计数;
⑤当定时器计数到TACCR0的值时,中断标志CCIFG位(之后会讲到)置位。当定时器由TACCR0返回0时,TAIFG中断标志置位;
⑥在定时器运行时修改TACCR0,如果新的周期值大于或等于旧的周期值,或大于当前的定时器计数值,那么定时器立刻开始执行新周期计数。如果新周期小于当前的计数值,那么定时器回到0。但是,在回到0之前会多一个额外的计数。
6.3.3 MC=2连续模式
在连续模式中,定时器重复计数到0FFFFH,然后重新从0开始增计数(除非每次重装计数初值)。当定时器从0FFFFH到0时,TAIFG中断标志置位。
应用:连续模式下利用捕获/比较器产生需要的时间间隔。原理是:计数在一直进行,捕获器TACCRX中存有第一个计数终值,每次捕获器计到TACCRX时,会产生中断标志,我们可以在中断服务函数中写入一个计算好的下一个的计数终值,这样无限计算和中断下去,那么该捕获器就会产生一个稳定的时间间隔序列。(其实吧,不明白也没关系。就算明白了,也不好用,因为计算起来很麻烦而且也不好用)
如图: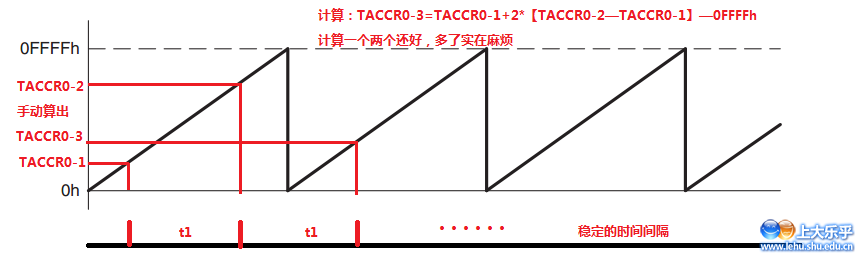
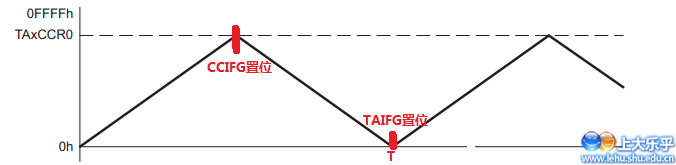
6.3.4 MC=3增减模式(常用于生成PWM波)
①该模式下,计数方向是固定的,即让定时器停止后再重新启动定时器,它就沿着停止时的计数方向和数值开始计数。如果不希望这样,就需要将TACLR置位来清除方向。TACLR位也会清除TAR的值和定时器的时钟分频。
②此模式下置位情况如下图:
 ③当定时器运行时,改变TACCR0的值,如果正处于减计数的情况,定时器会继续减到0,新的周期在减到0后开始。
③当定时器运行时,改变TACCR0的值,如果正处于减计数的情况,定时器会继续减到0,新的周期在减到0后开始。
如果正处于增计数状态,新周期大于等于原来的周期,或比当前计数值要大,定时器会增计数到新的周期;如果新周期小于原来的周期,定时器立刻开始减计数,但是,在定时器开始减计数之前会多计一个数。
这一章,我们讲定时器Timer0_A.(A类的都一样)
注意:下面所提到的所有寄存器,在TA后面插入0或1或2就分别表示Timer0_A、Timer1_A、Timer2_A(我这里省略了数字)
定时器很重要啊!
6.1 简介一下
定时器A是一个复合了捕获/比较寄存器的十六位的定时(加减)计数器。定时器A支持多重捕获/比较,PWM输出和内部定时,具有扩展中断功能,中断可以由定时器溢出产生或由捕获/比较寄存器产生。
特征简介:
○四种运行模式的异步16位定时/计数器
○自身时钟源可选择配置
○最多达5个可配置的捕获/比较寄存器(CCR)
capture/compare registers
○可配置的PWM输出
○异步输入和输出锁存
○对所有Timer_A中断快速响应的中断向量寄存器
下面这张图形象的解释了Timer_A的结构特性
6.2 TA(Timer_A)的几个基本操作设置(含寄存器介绍及设置)
声明:所有寄存器同样支持字和字节操作,不要忘记这是什么意思
所有寄存器初始化都为0x0000
6.2.1 TA控制寄存器TACTL(最常用最基本)
再次说明一下例如:TA0CTL、TA1CTL、TA2CTL分别表示3个不同
定时器A的控制寄存器
rw-(0)表示默认读写均为0
TASSELx:时钟源选择。尽量不要选TASSEL0-TACLK外部时钟源,因为如果TACLK和CPU时钟不同步,很容易出问题。(TA0CLK接P1.0引脚)00TACLK
01ACLK
10SMCLK
11~TACLK
IDx:第一次分频控制。ID0-1分频;ID1-2分频;ID2-4分频;ID3-8分频
MC:工作模式控制。(建议在修改定时器运行模式前先停止定时器(中断使能、中断标志、TACLR例外),以避免产生未知的误操作。)
00停止模式:定时器停止
01增模式:定时器计数到TACCR0
10连续模式,定时器计数到0FFFH
11增减模式:定时器加计数到TACCR0然后减计数到0000H
TACLR:定时器清零位。该位置位会复位TA寄存器,时钟分频和计数方向。
TACLR位会自动复位并置0
TAIE:定时器中断使能
0:中断禁止
1:中断允许
TAIFG:中断标志位
0:没有中断发生
1:有中断挂起
6.2.2 计数值存放寄存器TAR
①显然,最大存放计数值为0xFFFFh;
②(类似51单片机)可以被用来存放一个初值,然后选用连续模式。这样不断计满再手动填充,从而达到精确计时的效果;
③默认为0,且对该寄存器可以直接赋值;
6.2.3 扩展寄存器TAEX0
很简单,这个寄存器就是为了控制时钟源的二次分频(看结构图)。
该寄存器的低3为定义为TAIDEX:000-111分别表示1-8分频
6.2.4 捕获/比较寄存器TACCR0-TACCR4(共5个)
比较模式下,用来设定计数终值;
捕获模式下用来将捕获的TAR值存放进TACCRx中。
6.3 MC控制的四种工作模式的详细讲解
6.3.1 MC=0停止模式
这是系统默认的模式,定时计数器禁止工作。
6.3.2 MC=1增模式
总结几句话:(红色标记的很重要)
①此模式下严禁从0xffff开始计数;
②注意从0计到TACCR0,实际上记了TACCR0+1个数;
③计到TACCR0后,会回到0重新开始计数;
④如果TAR的值大于TACCR0,这时候会立即从0开始计数;
⑤当定时器计数到TACCR0的值时,中断标志CCIFG位(之后会讲到)置位。当定时器由TACCR0返回0时,TAIFG中断标志置位;
⑥在定时器运行时修改TACCR0,如果新的周期值大于或等于旧的周期值,或大于当前的定时器计数值,那么定时器立刻开始执行新周期计数。如果新周期小于当前的计数值,那么定时器回到0。但是,在回到0之前会多一个额外的计数。
6.3.3 MC=2连续模式
在连续模式中,定时器重复计数到0FFFFH,然后重新从0开始增计数(除非每次重装计数初值)。当定时器从0FFFFH到0时,TAIFG中断标志置位。
应用:连续模式下利用捕获/比较器产生需要的时间间隔。原理是:计数在一直进行,捕获器TACCRX中存有第一个计数终值,每次捕获器计到TACCRX时,会产生中断标志,我们可以在中断服务函数中写入一个计算好的下一个的计数终值,这样无限计算和中断下去,那么该捕获器就会产生一个稳定的时间间隔序列。(其实吧,不明白也没关系。就算明白了,也不好用,因为计算起来很麻烦而且也不好用)
如图:
6.3.4 MC=3增减模式(常用于生成PWM波)
①该模式下,计数方向是固定的,即让定时器停止后再重新启动定时器,它就沿着停止时的计数方向和数值开始计数。如果不希望这样,就需要将TACLR置位来清除方向。TACLR位也会清除TAR的值和定时器的时钟分频。
②此模式下置位情况如下图:
③当定时器运行时,改变TACCR0的值,如果正处于减计数的情况,定时器会继续减到0,新的周期在减到0后开始。如果正处于增计数状态,新周期大于等于原来的周期,或比当前计数值要大,定时器会增计数到新的周期;如果新周期小于原来的周期,定时器立刻开始减计数,但是,在定时器开始减计数之前会多计一个数。
MSP430F5529定时器Timer_A- 相关文章:
- MSP430F5529 (六)定时器Timer_A-2(11-28)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)